|
1. 先进的工业科学技术(AIST)全国学院与Kawada产业一道的日本现在发布了HRP-4C类人动物。
这类人动物站立1.58米高(62") 并且称43 Kg = 95磅。 它可能慢慢地走和看起来一位小姐。 她有30 DOF,并且为大约20百万日元卖或$200,000。
有些录影在这里。

 |
2. Kokoro和大阪大学开发了新的栩栩如生的机器人叫的Actroid DER3 (对DER2的后继者)。
这些机器人看非常人和谈话并且移动他们的头、胳膊、手和身体。
DER2 (文章链接) (站点链接) (youtube链接)
DER3
(文章链接) (站点链接) (youtube链接)


|
|
3.
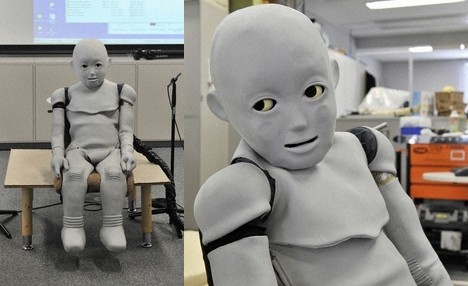
JST ERATO Asada 项目和大阪大学修造了孩子大
小的机器人叫的 CB2
( 与生物统计的身体的儿童机器人 ) 。
它是 130 cm 。
高,称 33 Kg 。,并且有 56 DOF 。
它有眼睛的耳朵的照相机和话筒。
它也有
在硅树脂皮肤埋置的 197 台触觉感受器。
机器人页。
链接 1;
链接 2;
链接 3;
录影 1;
录影 2;
录影 3;


|
4. 机器人Cub财团(11欧洲组织)修造了非常老练孩子大小的类人动物告诉的Robot
Cub。 这类人动物有53 DOF,站立104 cm高,并且称22 Kg。 超过11个机关的40个人横跨欧洲开发了这类人动物。 有二录影这里和在这里。


|
|
5. KITECH (工业技术韩国学院)介绍了称EveR-3的另一个机器人。 她是1.57 m高的(5' 2") 并且称135磅(60
Kg)并且有能力在16个表情上。 她有35 DOF在她的上身。
(文章链接) (文章链接) (youtube链接)
(youtube链接)


EveR-3 |
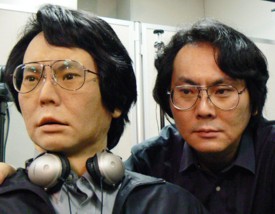
6a. Hiroshi Ishiguro
教授大阪大学有一个doppelganger
机器人由他自己制成。Ishiguro
是同样教授带领建立actroid
的队(参见下面) 并且actroid DER
和actroid DER2 (被显示以上)
。这个机器人有46
个自由程度。有几录影可利用这里。其它新闻条目是这里。

6b. Doppelgangers
得到普遍。这被显示在2006
年中国机器人商展最近被拿着在北京的一邹・Renti
(l) 。

|
|
7. 大阪University & Kokoro Inc. 导致了Actroid 类人动物的一个被升级的版本称
Repliee Q1 为现在进来在名古屋, 日本的商展2005 年世界市场。 Repliee Q1 有硅皮肤和神色非常人当她坐和gentures 对您。这个机器人有41 DOF (对31 为Actroid) 。
 < = Repliee Q1
< = Repliee Q1
|
8. 其它韩国小组在KITECH 生产了非常是象Repliee-Q1 的一个机器人。 这称 EveR-1 。 它是大约1.6m 高和称大约50 公斤。 队, 由Baeg 月亮洪朝向, 高级研究员在
工业技术, 星期四(5/4/06) 韩国学院采取了套女性机器人, 命名EveR-1, 在陈列期间在汉城教育文化中心。Baeg, 花费3 十亿赢取了(3.16M USD) 在创造EveR-1 在一年, 看超出他的日本敌手由做式样移动四肢体在今年末期以前。


曾经- 1 KITECH
|
|
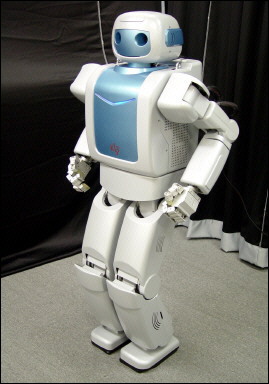
9. 新Asimo 类人动物
本田介绍了他们的更新Asimo 类人动物。它是130 cm 高,
称54 公斤= 119 磅, 和有34 DOF 。这精密录影。

|
10. 这非常似人类人动物由Le Trung的Aiko
(Brampton,加拿大)修造。 她当前有23 10在她的手指的DOF。今后她将还有12 DOF。 她是1.52
m高的,但是不可能站起来由她自己。 Trung有有些录影这里。
了不起的工作在仅一年!


Aiko
with Trung |
|
11. Kokoro 梦想和大阪大学宣布了开会机器人2003 年11月19 日在
国际机器人陈列2003 年在东京。这个机器人称
Actroid
并且它是非常现实的。 Actroid 规格: 系统包括三个不同单位: 类人动物零件:
高度= 1.3m; 宽度= 0.42m; 坐的长度= 0.725m;
重量= 30 公斤。 机器人有 31 DOF。 它操作压缩空气和电(120w) 。
控制单元: 高度= 0.6m; 宽度= 0.75m; 长度= 0.6m; 重量= 40
公斤; 包含主要计算机。 压缩机单位: 高度= 1.37m; 宽度= 0.9m;
长度= 0.9m; 电力消费= 3.7 千瓦; 噪声< 50 db 。
|
这Actroid
电影。 这 其它文章 关于Actroid 。


Actroid 与朋友。 |
| 12. 中国介绍了唱歌的机器人告诉的Dion
。当它象Actroid
不是几乎一样先进被显示以上,
它是非常栩栩如生的。这是一个life-sized
常设机器人以非常女子般地的形状。故事和录影是这里。

|
13. 中国科学院的自动化学院在北京介绍了新女性类人动物称Rong
城在2006 年8月7
日。这类人动物是168 cm
高和称60
公斤。主要设计师是粤Hongqiang
并且他的队需要一年修造这类人动物在一费用的$37,500
(300,000 元) 。Rong
城将被送到四川她将是接待员和导游为博物馆的科学博物馆在成都。
(* 新*)
文章
文章
录影 (Quicktime)


|
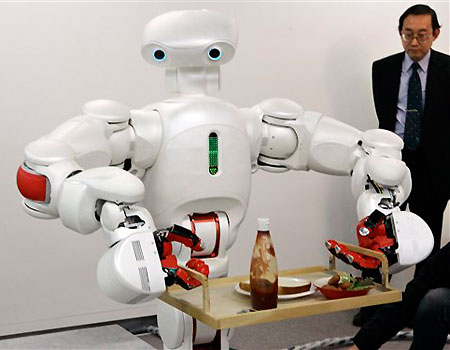
| 14. KIST 介绍了 Mahru-Z 机器人佣人 (2010) 。
它是 130 cm 。
高,称 55 Kg ,并且有在每只手的 3 个手指。
它有 35 DOF 。
链接 1;
链接 2;
链接 3; 录影 1;
录影 2;

 Z (right)
Z (right)
|
15. KIST 在 2009 年介绍了 Mahru-R 。
它是 145 cm 。 高,称 67 Kg 。和 35 DOF
并且有在每只手的 3 个手指并且走在 2.6
Km 。 /hr 。
链接 1;
录影 1;
录影 2;

|
| 16. KIST 在 2008 年介绍了 Mahru-M 。
它约为 150 cm 。
高,在轮子称 62 Kg 。,并且滚动。
大概大约 20 DOF 。
链接 1;
M (left)

|
17. Choromet (HRP-2m) 是花梢玩具类人动物。
它是 35 cm 。
高,称 1.5 Kg 。,并且有 20
DOF 。
它的费用是大约 500,000 日元 ($4,400) 。
Choromet 可能单独躺下和站立。
它在一条腿可能也站立。
它使用操作系统的 Linux 。
Choromet 由日本先进的工业科学技术
学院 (AIST) 和 4 家私人公司开发。
链接 1;
录影 1;

|
| 18. E-nuvo 是 126 cm 。
日本技术研究所修造的高类人动物。
它称 15 Kg 。,并且有总共 21 DOF 。
它使用锂离子电池力量。
链接 1;
录影 1;

|
19. 原子 7xp 是丹・
(2010 1 月 ) 开发的新的类人动物 Mathias 在
FutureBots
在过去 8 年期间。 它是 158 cm 。
高,称 73 Kg ,并且有 49 DOF ( 包括 10 头的和 10 手的 ) 。

|
| 20. 阿拉伯联合酋长国(阿拉伯联合酋长国的) Pal 技术宣布了非常老练新类人动物称REEM-A 。它站立1.45 m 高, 称41 公斤和有30 DOF
(自由程度) 。他们的规格是这里。有一些精密录影这里。

|
21. Kawada 现在发布了HRP-3P
类人动物。这个机器人站立160
cm 高和称65
公斤。它有一共计36
自由程度。Kawada 的HRP-3P
页是这(用日文当然)
这里一篇文章从Engadget
。这充分的HRP-3P
规格以许多好的图片。这AIST
新闻发布。


|
22. 日本Tmsuk 生产了他们称Kiyomori
的一个新机器人。他们有他们自己的网站以录影这里。Kiyomori
被提出作为Samurai
战士。这录影从Youtube
显示它走。

|
23. JVC
发布了一个新小类人动物机器人称J4
。它站立20 cm 高和称只0.77
公斤但它有26
个自由程度。这一个好的介绍从Plyojump
。


|
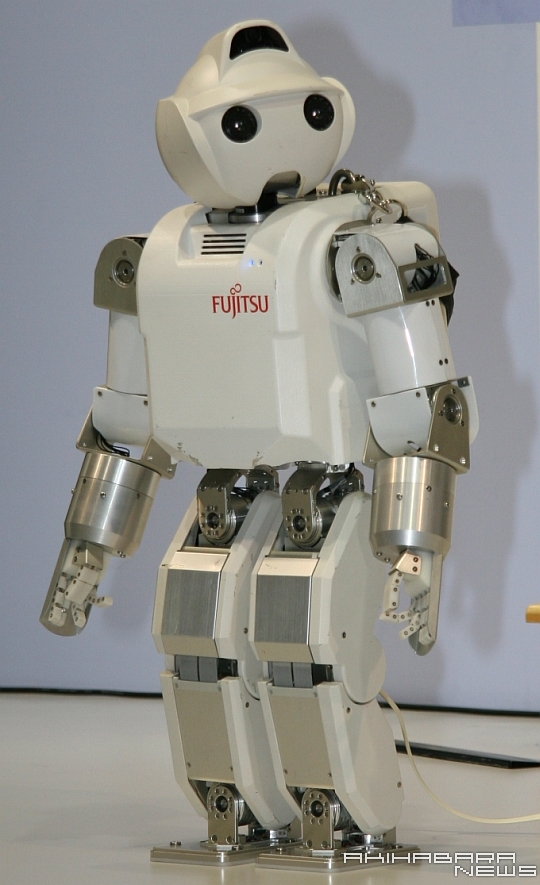
24. 富士通现在发布了HOAP-3
。这小类人动物站立60 cm
高和称9
公斤。这一篇文章。这类人动物有28
个自由程度和使用1.1
千兆赫奔腾处理器连续RT
Linux 。


|
25. 英国小组生产了称Robothespian的一个执行的机器人。
这个项目在1月2005年开始了。 Robothespian有大约30 DOF,站立175 cm高(加上18 cm立场)并且称33 Kg。
这名机器人演员为55,000磅(US$ 85,000或者7.9M日元)现在是可利用的。 有二录影这里和在这里。


|
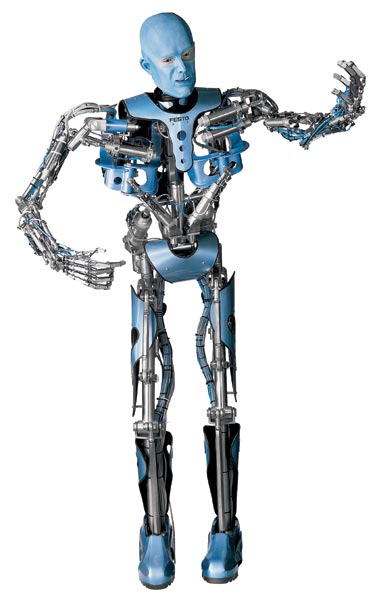
| 26. Fesco, 灵魂专家, 修造了 巨大的机器人叫的Tron x。
这个机器人站立大约2.8 m (9 英尺) 高和称大约300 公斤(660
磅) 。 它被管理 所有 不同的大小200 个气动力学的圆筒。 1997 年Aparently 这个机器人被修造了在澳洲。
或许当前的模型是第二个版本??


Tron-X - 200+ DOF
|
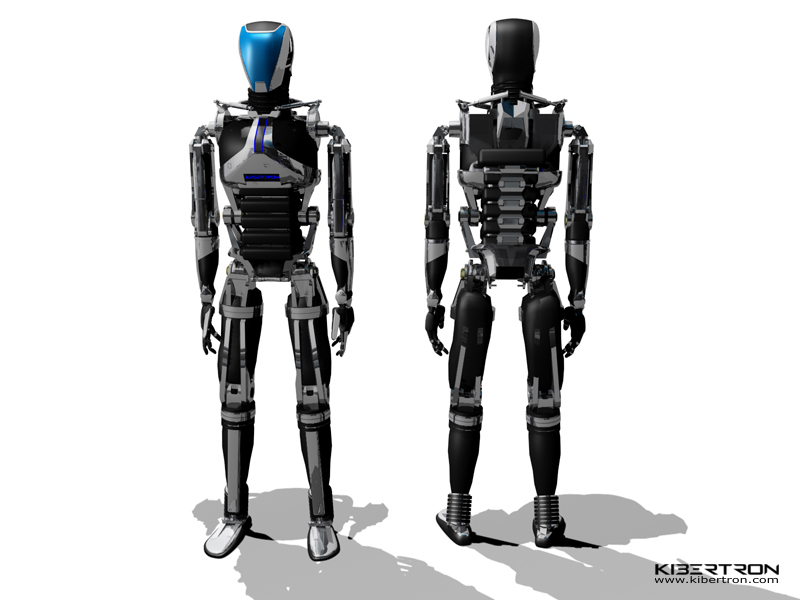
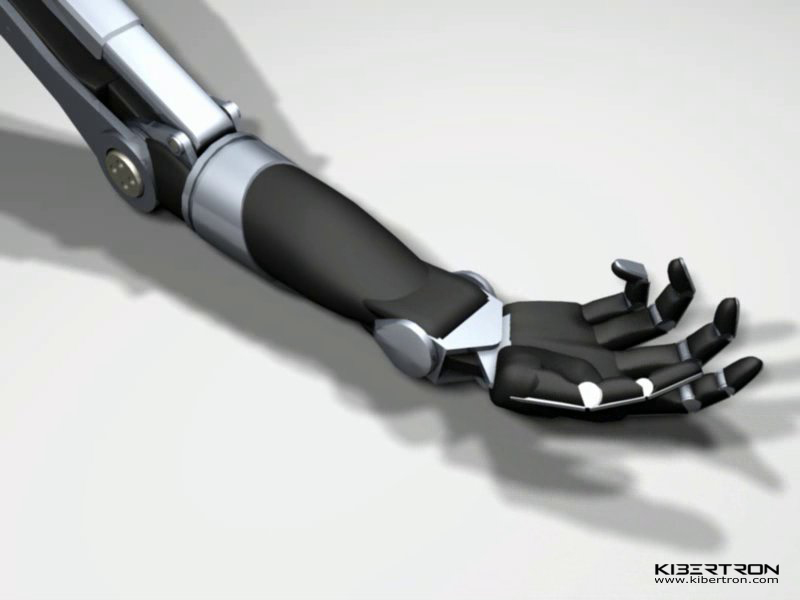
27。公司告诉 Kibertron Inc, 位于索非亚, 保加利亚有一个全方位类人动物项目称 Kibertron 。 他们的类人动物看起来象终止者。它是1.75m 高(5 ' 9") 并且称90 公斤(200 磅) 。 他们有职员23 。 Kibertron 有82 - 是很多的DOF 。 手有20 DOF 每个并且胳膊有8 更多DOF 为一共计28 为各只胳膊& 手。
这他们的项目概述。


前面& 后面 胳膊& 手
|
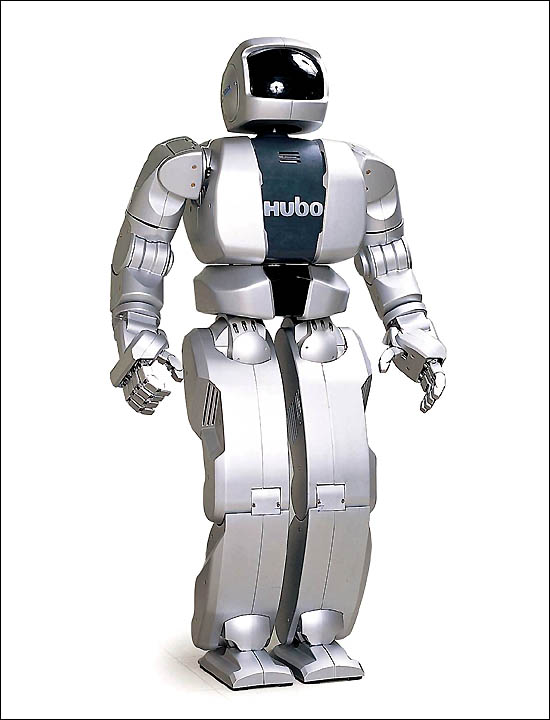
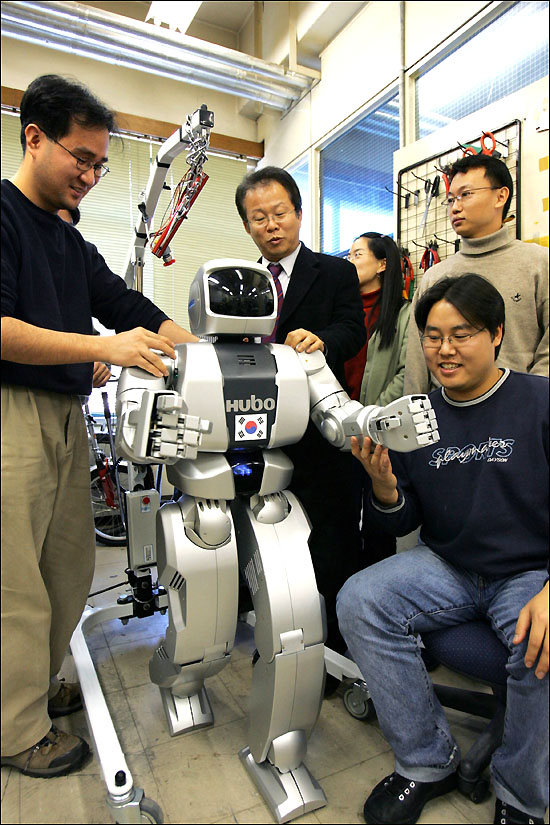
| 28 。 KAIST 宣布2005 年1月6 日, 他们称HUBO 的新 类
人动物。 项目负责人是6月ho Oh 教授, 并且命名"KAISTian" 年。 他们的类人动物有41 DOF,
站立1.25m 高(49") 并且称大约55 公斤(121 磅) 。 他们的机器人能走, 谈, 和了解讲话。
这个机器人走以1.25 km/hr 的率。韩国清楚地是传染性的在世界类人动物发展种族。 这个小组位于 Daejeon, 韩国。


Hubo
走
Hubo 可能独立地移动他的手指(但是ASIMO 不能) 。这夫妇更多文章: Chosun 新闻 和 Theautochannel。
|
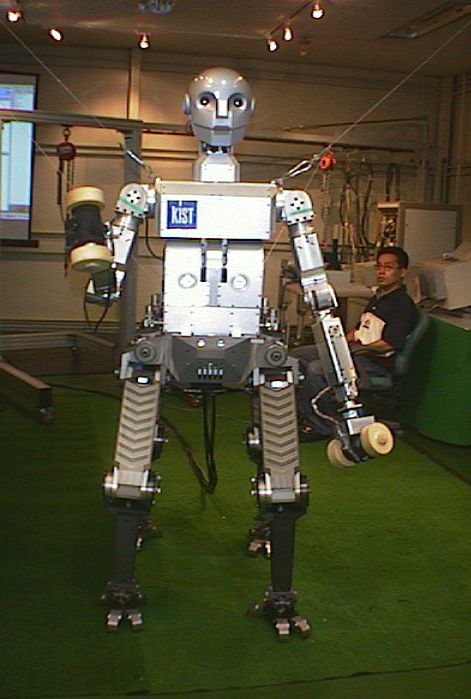
29. KIST
修造了二类人动物称Mahru (男性)
并且Ahru (女性)
。。开发小组是主角由Bum-Jae
Jae You
。这个小组要求他们的类人动物是世界的第一network-based
类人动物。它认为象人和学会象人。它站立大约1.5m
高(60") 并且称大约67 公斤(147
磅) 。它可能走, 谈,
和了解讲话。它走在0.9
km/hr 。它有35
个自由程度。队现在从事2009
年将被发布的Mahru II 。


Mahru
Mahru II
|
| 30。 2001 年9月10 日富士通实验室公司宣布了他们的玩具机器人告诉的HOAP-1,
一个18"高13 磅机器人以20 个自由程度。费用是$41,000 或4.8 百万日元。 现在他们宣布了 其它机器人称HOAP-2 。 它大致同样的大小。


HOAP-1 HOAP-2
|
31. 在2003 年9月19 日索尼宣布了其它 小类人动物称QRIO。 它相当相似与SDR-4X 。 它走更好和可能从秋天恢复更好。
 QRIO
QRIO
|
| 32。 索尼介绍了SDR-4X 为Robodex 2002 年。伟大的新机器人竞争反对HOAP-1。 电影。
许多图片。
文章& 更多图片。 
|
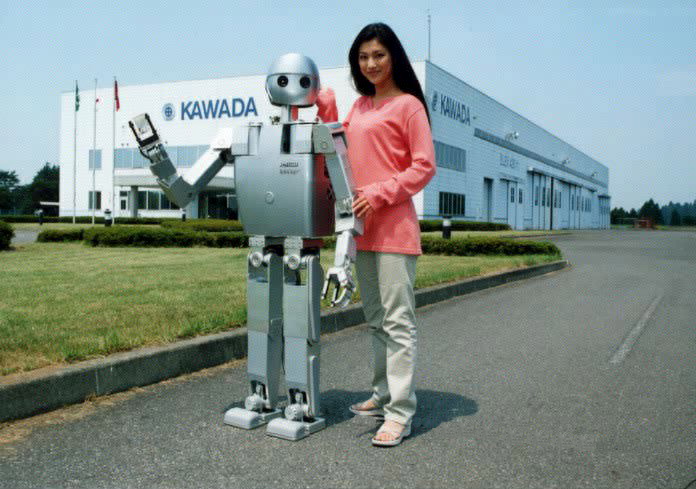
33. Kawada Industries Inc. 介绍了 HRP-2P 为Robodex 2002 年。
这类人动物看来是非常印象深刻的。它是154 cm (60") 高, 称58kg (127 磅) 并且有30 DOF 。这 新闻发布 (用日文) 。注意缺乏电池叠板。 这关于 HRP2 的一个新故事。 有一个 新链接对HRP-2 一些录影在行动。
 
|
| 34. 一个牙齿训练机器人称Simroid 由Naotake Shibui 博士介绍了, 在东京的日本牙齿大学, 与技术员合作在Kokoro Co.
开发机器人。这看非常人和均匀尖叫声在痛苦中当实习生犯一个错误。
 Simroid
Simroid |
35. 丰田Motor Company 现在介绍了可能弹小提琴的类人动物。这显示改善在手指的手巧。这个机器人站立1.52 m 高并且它有17
联接在它的胳膊和手里。机器人录影演奏"盛况和情况# 5" 由Elgar 是这里。

|
|
36. 丰田Motor Company 宣布了机器人他们长的 等候的 随员在 2004 年3月11 日在东京。 他们计划4 个模型(被显示在这和下3 个词条) 他们叫做伙伴机器人和被设计功能作为个人助理为人。 第一个是 走的版本。这个机器人是1.2m (4') 高和称35 公斤(77 磅) 。 它意欲协助年长的人。

日本页
|
37 。丰田计划第一次显示他们的机器人在全球性 和谐的 商展2005 年陈列哪些明年将发生(从2005 年3月25 日到2005 年9月25 日在Aichi, 日本。 第二个模型是 辗压版本。这类人动物滚动在轮子但有人看的上身。 它意欲为制造业目的。 它是1m (40") 高和并且称35 公斤(77 磅) 。

日本页
|
| 38。 丰田的第三个模型容易地 是小组的最异常的机器人。 这个模型称 mountable 版本。 这基本上是 可能走的椅子! 哇! 真是概念! 它站立1.8 m (6') 高和称75 公斤(165 磅) 。注意, 人在椅子佩带崩溃盔甲。 你希望, 盔甲不会是必要的。

日本页
|
39。第四个模型由丰田被生产是一个 导线被操作的版本。 数据未被给关于它的大小或重量。 它比其他轻的和可能迅速行动。 丰田有他们的机器人电影在对他们的站点的行动。

日本页
|
| 40。 二新类人动物叫做ARNE 和ARNEA 宣布了2003 年8月5 日在俄国。
他们由圣彼得斯堡公司修造了告诉New Era 和学生从圣彼得斯堡工艺学校大学。这些类人动物站立1.23 m (4') 高和称61 公斤(134
磅) 。他们有28 DOF 。 项目, 主角由亚历山大・Yakovlev 新时代机器人技术区段,
运行二年。 
|
41。Kawasaki 重工业, Tokyu 建筑Co. 、有限公司、先进的工业 科学和技术全国学院 ("AIST"), 和本田有一个新项目称 HRP-1S 。 类人动物由本田修造了并且控制软件由AIST 开发了。 这篇文章显示类人动物操作反向铲。我们假设类人动物象本田的Asimo 或P3 有DOF 的同样数字。

|
| 42.北京技术研究所现在有称BHR-2
的其它类人动物项目。这类人动物称"Huitong",
孩子。它是160 cm
高和称大约63
公斤。一点其它信息被发布了,
但我们假设在有至少32 DOF
和由开发BHR-1
的同样小组大概开发了。
 BHR-2
BHR-2
|
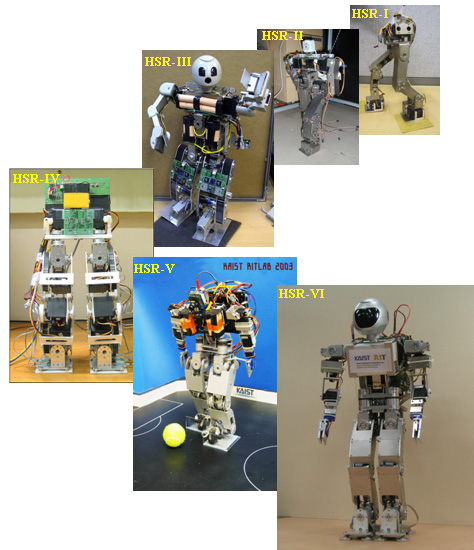
43. KAIST
有其它主要类人动物开发努力在RIT
(机器人智力技术)
实验室在Daejeon,
韩国。项目负责人是Jong-Hwan
金教授。他们有大约15
个人研究项目并且他们修造了一系列的6
个或7
个类人动物机器人新哪些是HSR-VI
并且告诉的HanSaRam
。它有25 DOF 包括12 个DC
马达和13 个伺服马达。
 HSR
HSR
|
| 44。 北京技术研究所 有一个大 类人动物项目称BHR-1。
这个机器人是1.58 m (5 ' 2") 高和称76 公斤(167 磅) 。它有32 DOF 。它可能走在1 km/hr 以33 cm
步。项目负责人是Jinsong Wang 教授李・职员包括Qiang 黄的Kejie.Other, Yuechao Wang, 分钟tan,
Tianmiao Wang 和。 这个机器人看来是非常先进和还相似与数日本机器人被显示以上。  BHR-1
BHR-1
|
45。Kawada 产业航空器和机械系统分部公司。修造了H7 机器人为东京Univ 。他们现在开始了他们自己的项目使用一些同样技术从H6 & H7 。它的告诉的 Isamu。 

Isamu 是1.5 m (5') 高和6 米宽和称大约55 公斤(121 磅) 。 它有32 DOF 并且您能看头比H6 或H7 似人。
|
|
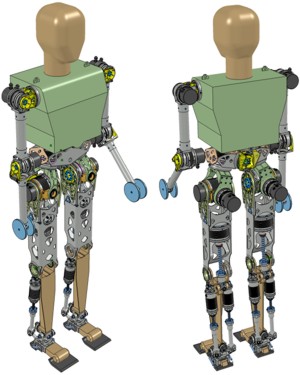
46. ECCE 机器人 ( 在一个服从设计的机器人
的被实现的认知 ) 是异常的类人动物
因为肌肉和骨骼在我们人的骨骼和
肌肉以后被塑造。
它由大学财团修造包括
苏克塞斯艾塞克斯大学,苏黎世大
学,贝尔格莱德大学,慕尼黑大学,大学和 机器人演播室
。
它是克罗诺司项目的副产品。
它有 80 DOF 。
介绍了它 2009 年 8 月 11 日。
录影 1;
录影 2;

|
47. Kawada 产业介绍了在 2009 年 11 月 19 日的
NEXTAGE 汇
编机器人。
它很好被设计并且看起来伟大。
它有 15
DOF ,并且可能举 1.5
Kg 酬载。
录影 1;
录影 2;


|
|
48. 大学德黑兰(伊朗)介绍了称Surena-2的一个精密机器人。 这个机器人看起来象在这张名单的许多机器人。 它是1.45 m高的并且称45 Kg。
它有22 DOF (12在它的腿, 8在它的手和2在它的头)。 这个机器人跟随只有8 DOF的非常原始Surena-1。
Surena-2接收了10,000个工时努力完成。
(文章链接) (文章链接) (文章链接)
(文章链接)
 Surena II
Surena II
|
|
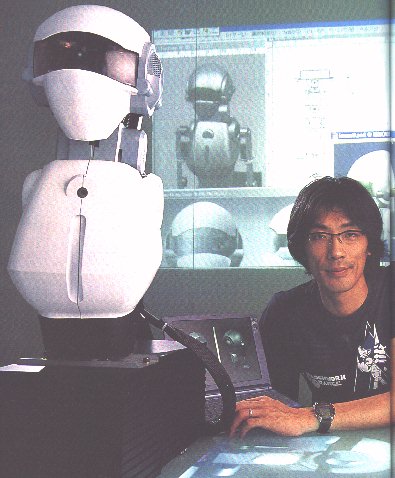
| 49。Hiroaki Kitano Kitano 共生系统(东京, 日本)
是日本Science 和Technology Corp 辅助者(参见词条在左边由日本政府资助反过来修造机器人他称SIG 的- # 11)
(共生智力小组) 。相片在展示SIG 和Tatsuya Matsui 之下。 Kitano 向机器人建造者挑战世界。
他相信, 他的机器人将是原型。 我们将看见对此。顺便说一句, 他们 寻找人 加入他们的项目。  
Matsui 圣 和SIG
|
50。Hiroaki Kitano Kitano 共生系统(东京, 日本) 是日本Science 和Technology Corp 辅助者反过来由日本政府资助修造一个机器人婴孩告诉Pino 。Pino 有29 个马达和站立大约75 cm (30") 高和称8 公斤。这 链接对时代杂志文章。我 最近发现的一个 新Pino 链接
。
哇! Kitano 现在给被使用为Pino 的去软件和硬件设计。 请去 这里 和报名参加。
 Pino - 8KB Pino - 8KB
SIG 设计链接
PINO 设计链接。 |
| 51。Kitano 现在有其它小机器人告诉的 Morph3。 它是38 cm 高(大约15 英寸), 有30 DOF 和称大约2.4 公斤= 5.3 磅。它并且使用Bluetooth 通信。
 
Morph3
|
52。及早在10月2001 年, Kitano 共生系统宣布了 其它项目叫"Morph" 。 Morph 用途 Bluetooth 无线 通信协议通过命令对机器人和送反馈从机器人回到主要计算机。 这其它文章。 村田是一co-developer 在这个项目。 Morph 有26 DOF 和站立大约13.6"(35cm) 高。 我的最佳的来源, Gianluca
寄发我一些 链接以图片。  
|
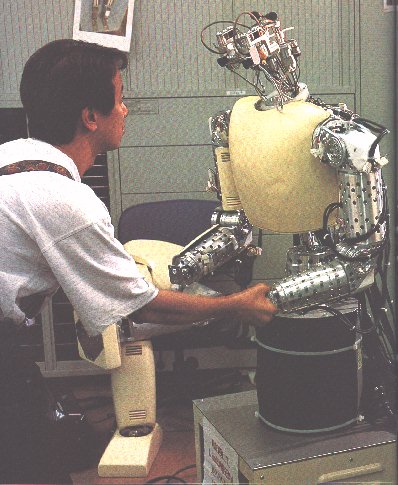
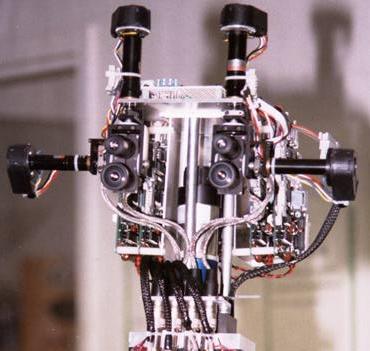
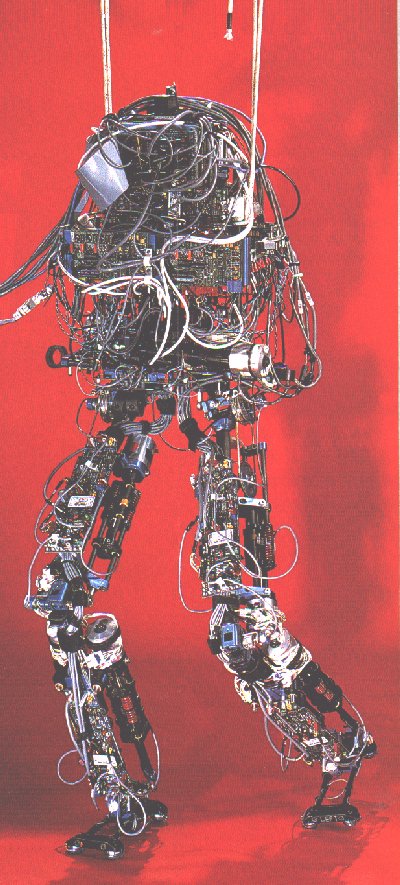
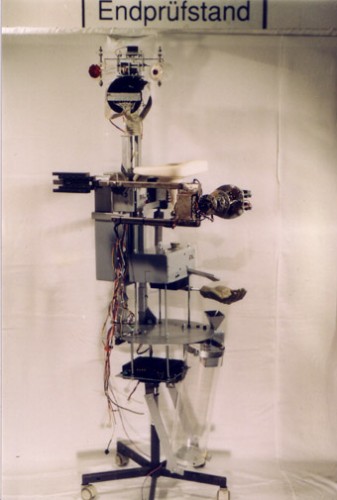
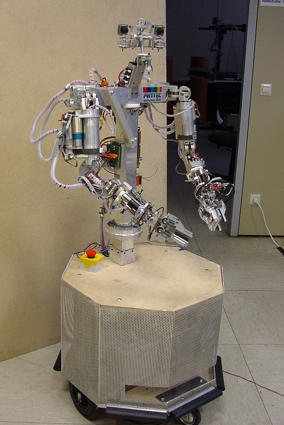
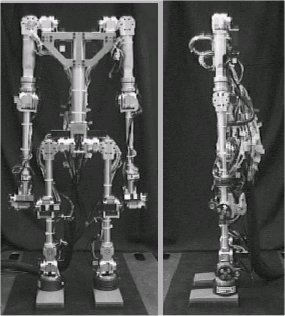
| 53. 电工实验室
在Tsukuba, 日本修造类人动物在类人动物互作用实验室根据Yasuo Kuniyoshi 的教授方向。他们的类人动物称杰克,
他们的机器人花费了方式$1,000,000 - 和它的平静没被完成。 杰克并且以为特色在这个月的 架线的 杂志文章里关于机器人。(pgs 9月2000 年, 252 - 272) 。 腿是几乎没有可看见的在背景中。 Gordon 城寄发了我其它"杰克的" 图片和一个 链接到一篇好的文章。杰克有46 DOF 。  
|
54. Tohoku 大学现在有其它项目叫做"Saika3" 。这个机器人看alot 象本田机器人。这是1.27m 高和5 米宽和称47Kg 。 Saika3
有30 DOF 
Saika-3 小组
|
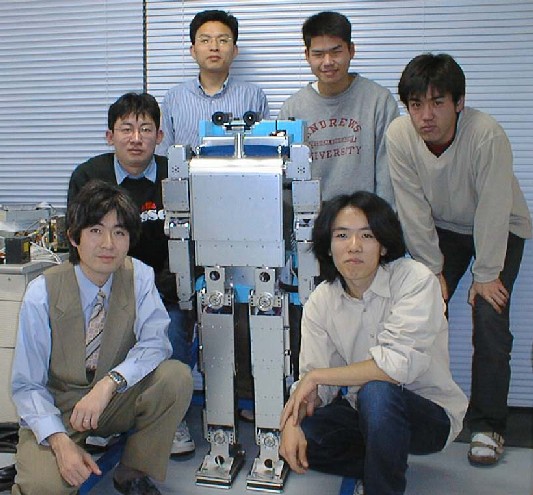
| 55。 Jouhou 系统Kougaku 实验室在东京大学有 一个新项目称H7。 它其它biped 相似与H6 。 其它H7 链接。(< = 新链接)


H7 清楚地是非常相似在大小和能力与H6 。他们有H7 18Meg 录影走在上述相片被拍的Kawada 产业机场。 |
56. Jouhou 系统Kougaku 实验室在东京大学有 一个项目称H6。 它相似与H5 。  
H6 是1.37 m (4'6") 高, 关于59 m (23") 宽, 和称55 公斤(121 磅) 。它有35 DOF 。
注: Saika 和H5 被移动了向 历史机器人项目 页。
|
|
|
|
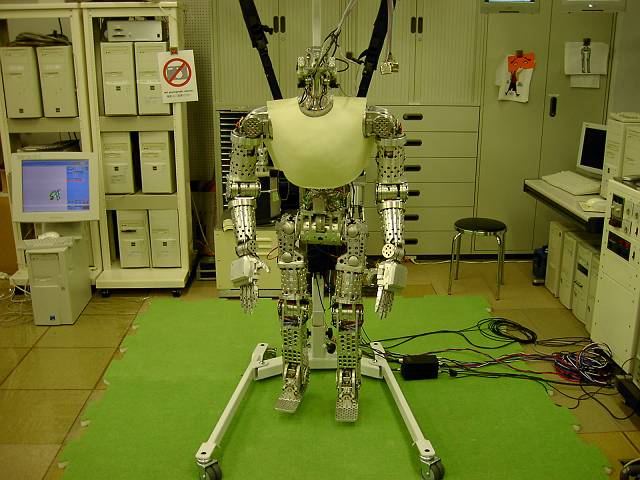
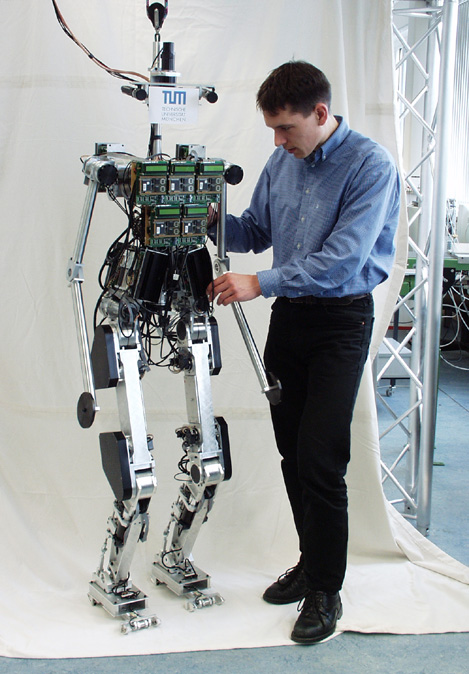
| 57。有现在第二个主要项目在慕尼黑(TUM)
- 告诉的LOLA技术大学 。这类人动物将有22 活跃地被驾驶的DOF 腿有7 DoFs 每个, 当上身有二并且各条胳膊有四。
(* 新6/2/6 *)
 LOLA LOLA
|
58。有一个大机器人项目努力去做在学院为应用的技工在慕尼黑(TUM) 技术大学。
他们的机器人称"Johnnie" 并且它可能已经走。他们现在设法做它运行。这意味着有二个主要项目在慕尼黑。Johnnie 是在显示在汉诺威公平今年春天。他们有二录影在他们的站点。 
|
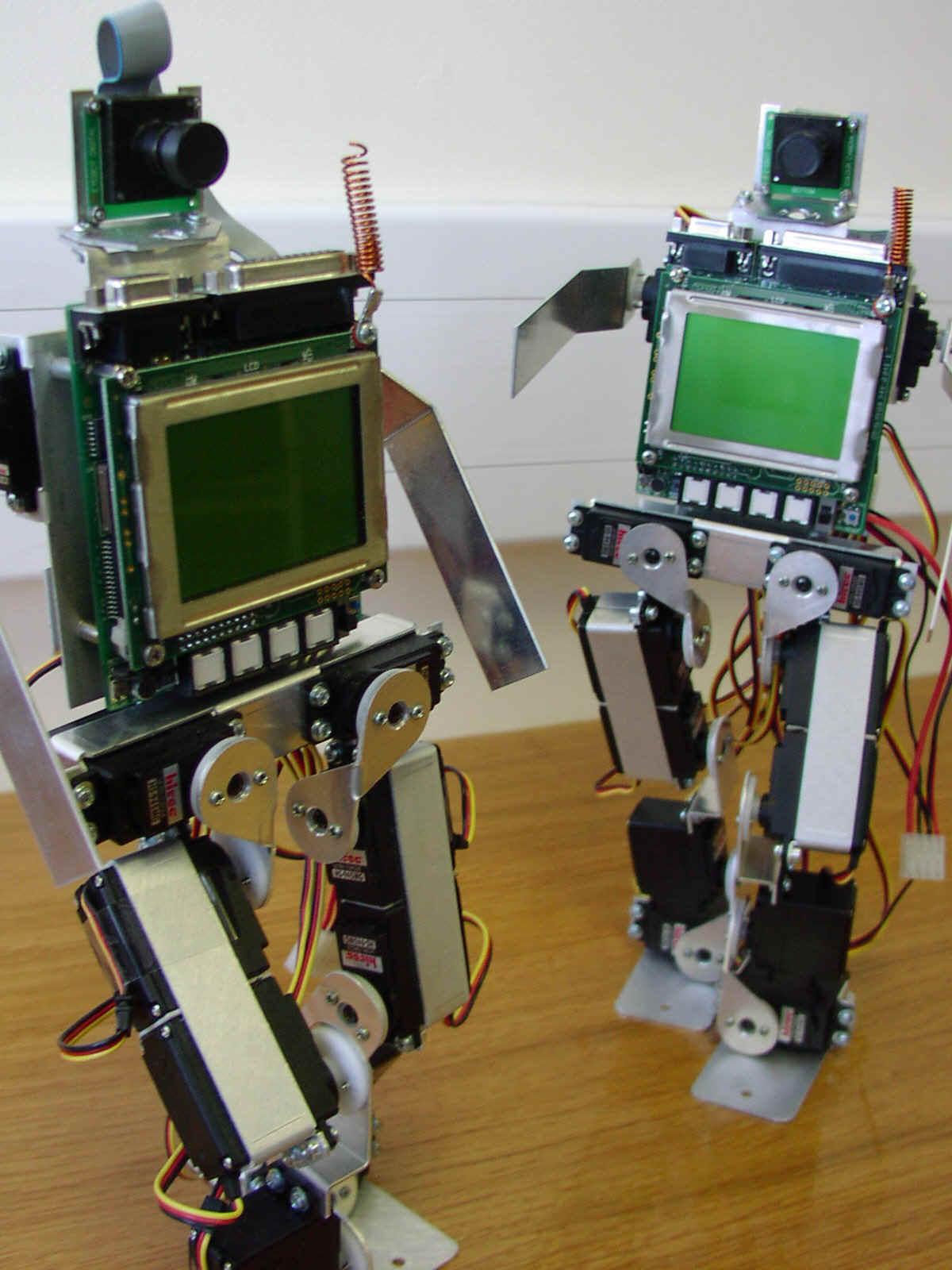
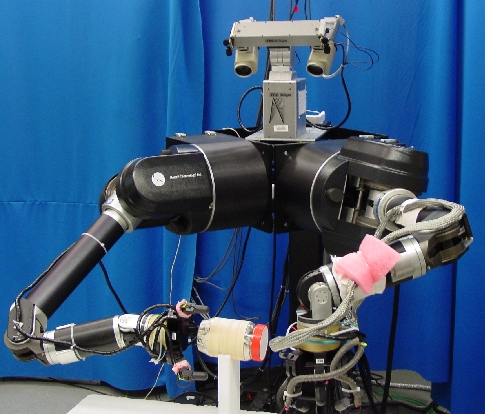
| 59. 这另一个项目称从Sugano实验室的TwendyOne在Waseda大学在东京。
在这类人动物的大前进是它的与有触觉感受器的手指的非常老练手。 类人动物有47 DOF并且站立1.47 m高并且称111 Kg。
他们有两三部电影这里。

Twendy One |
|
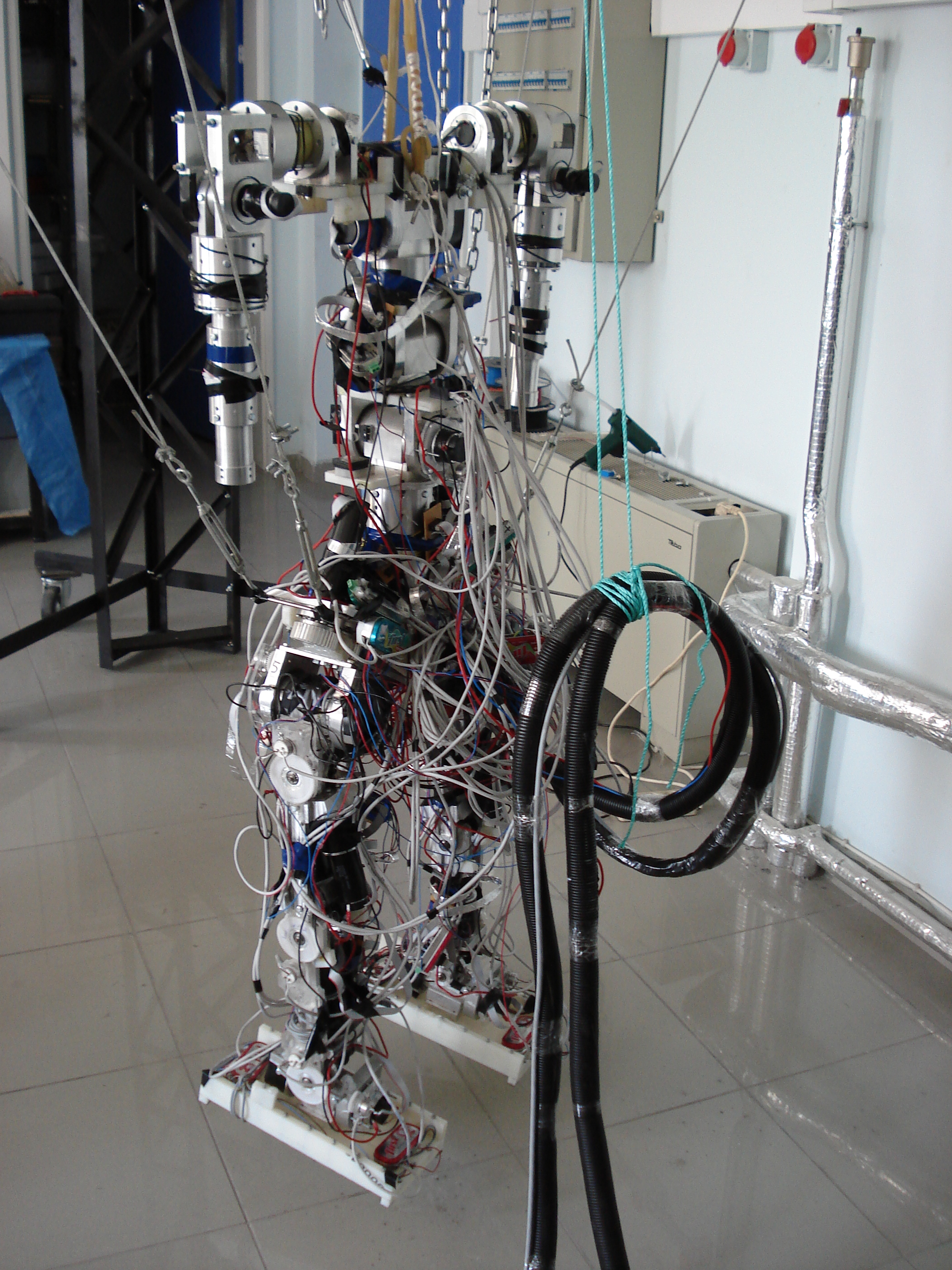
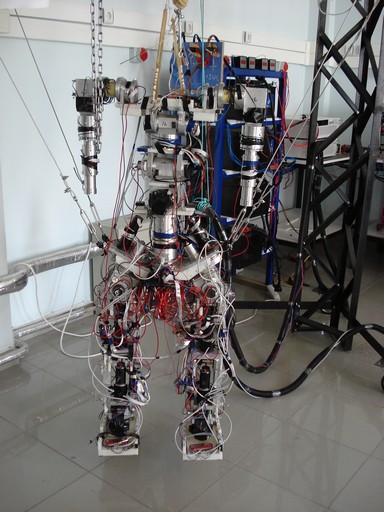
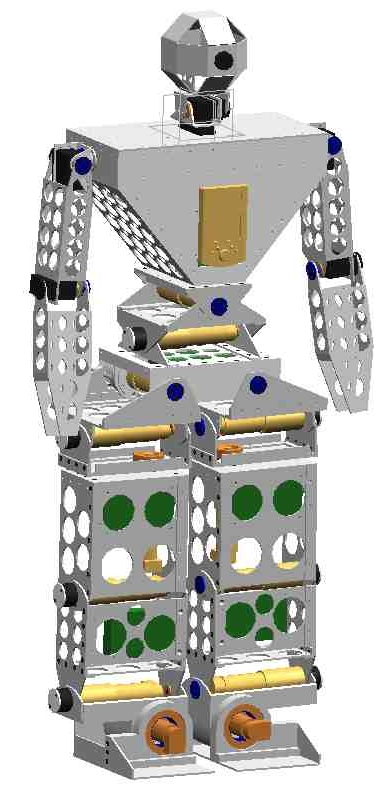
| 60.
我从Davut Akdas博士收到了电子邮件。 他在土耳其修造了第一类人动物在Balikesir大学在东北土耳其。
他的类人动物称RoboTurk。
它有总共23 DOF包括12 DOF在腿, 5 DOF在身体和2 DOF在胳膊。 重量是55 Kg,并且高度是150 cm。
他的类人动物可能走今后,向后和斜向一边。 它可能甚而攀登小步。 哇! 了不起的工作!


|
61。数教授Gordon Wyeth 和他的学生开始了项目称 GuRoo (为总Underfunded Roo) 在昆士兰 大学, 在布里斯班, 澳洲。 GuRoo 将有 23 个自由程度
, 将站立1.2 m 高。它计划的重量是30kg. Guroo 参加了最近Robocup 2002 年在日本。 队 有6 个人。队员的当中一个, Damien Kee, 张贴了 他们的机器人一些录影采取它的第一个试探性步骤。整洁!

|
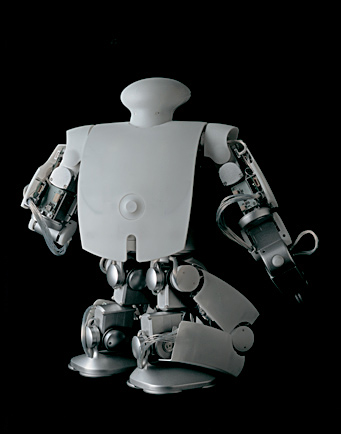
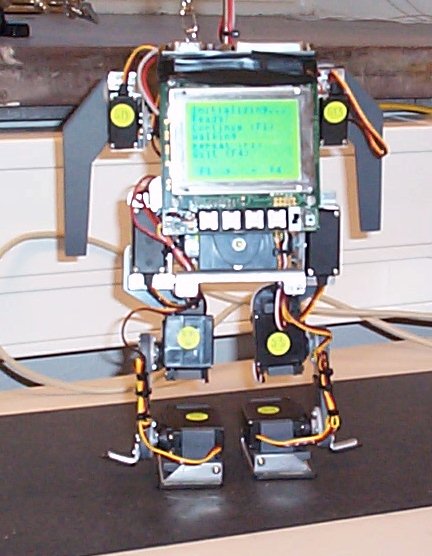
| 62. 日本Science 和Technology Corp
(京都, 日本) 最近
显露一个5 年项目修造类人动物机器人。这个项目开始了在10月1996 年。项目负责人是Mitsuo Kawato 博士并且他们有职员大约18 。他们的类人动物机器人称 DB (参见下面) 。
 32KB 图象 32KB 图象
|
63. 达姆施塔特技术大学进行中现在有类人动物项目。他们的类人动物称Lara
。它是130 cm 高和有18 DOF
包括38 块Nitinol
导线肌肉。小组负责人是Oskar
冯Stryk
教授并且他们有大约15
名学生研究项目。
 Lara
Lara
|
| 64. 阴影项目 (伦敦, 英国) 这个小组发展 类人动物bipedal 走的机器。 他们并且有几个产品待售。 他们的 职员 包括大约14 个人。下面是他们的bipedal 步行者的图象。
 208K
208K |
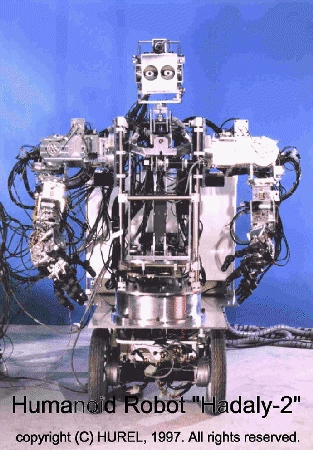
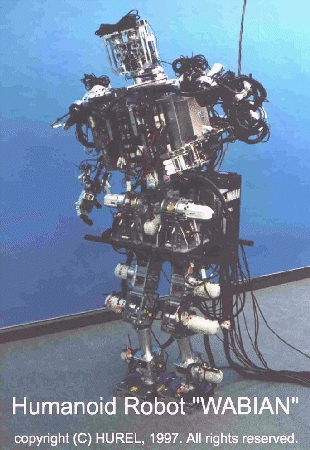
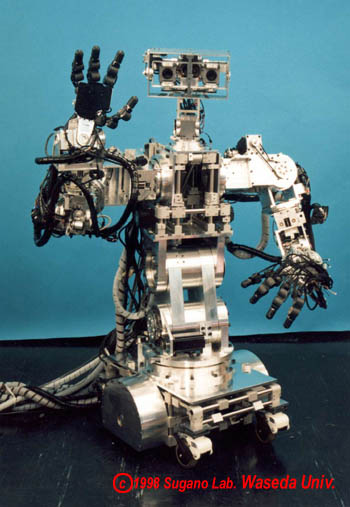
65. Waseda 大学类人动物项目
(东京, 日本) 他们的机器人是大约6 英尺高和称600 磅。 它可能
几乎没有走, 但。这个机器人和本田的机器人以为特色在PBS
节目叫做"宣扬三次在1998 年3月的机器人上升" 。Waseda 类人动物项目由六个小组组成:
下面是Hadalay-2 和Wabian 的图象。


|
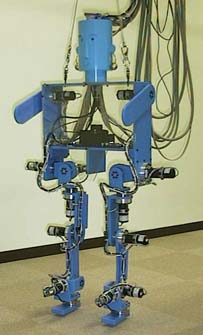
| 66. 先进的工业科学和技术全国学院在东京(AIST) 支持15 个研究所遍及日本包括8 在Tsukuba 科学东京城市北部。他们主办 1998 年 开始的类人动物项目。他们实际上有 很大数量的项目。 

在我们之上看见P3 和在右边是HRP 的腿学会走。
|
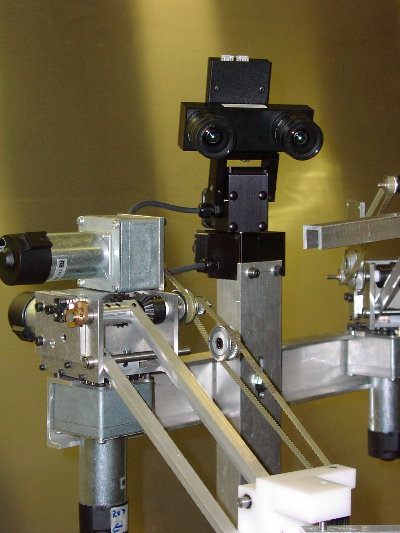
67。 Chalmers 大学 并且有一个全方位机器人项目称 开始在2000 年的夏天的Priscilla 。她根据人的充分的大小的骨骼。她将由液压缸供给动力。 您能看, 她有双目视觉。  Priscilla 。
Priscilla 。
|
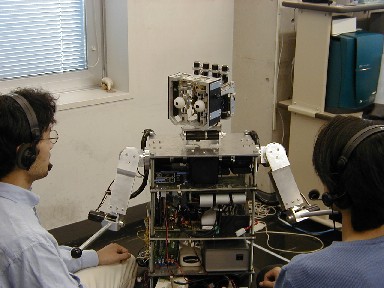
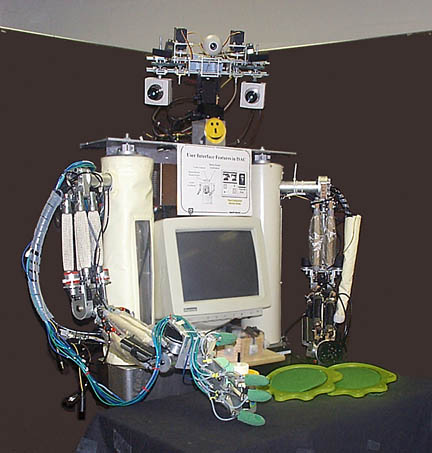
| 68。东京 大学
有一个大项目称 Telesar2 。
它
包括二个主要系统: 1 。似人上身以胳膊和头登上了在一个转动的塔。 并且2)
有几台显示器的控制系统并且人工操作佩带在他/她的手的二手控制。 这似乎相当独特。 手似乎是非常高质量。
项目是主角由Tadakuma 博士情报学和技术研究生院的Tachi 实验室在东京Univ 。 他们有许多录影在他们的站点。 他们陈列了他们的系统在世界商展2005 年在AICHI, 日本从6月9 日到2005 年6月19 日
 Telesar 2 。
Telesar 2 。


|
69. 机器控制实验室在 KAIST 在Teajon, 韩国有其它类人动物项目称 KAIST 类人动物机器人(KHR-1)。这个项目开始了于1月2002 年和现在包括 6月Ho Oh 和12 名学生教授。KHR-1 站立1.2 m 高和称48 公斤。 它有21 DOF, 可能走。 有录影在他们的站点。


|
| 70. ARICC (先进的机器人学和聪明的控制中心) 在电子和电子工程学, 新加坡工艺学校学校有一个 主要类人动物项目 进入哪些他们是大厦足球演奏类人动物。他们修造了几类人动物, 新哪些告诉Robo-Erectus III 。 它站立50 cm 高和有22 DOF 。项目包括大约 15 名成员 和是主角由Changjiu 周教授。  
|
71. 皇家学院伦敦有 二个类人动物项目。 他们有类人动物的上半方相似与嵌齿轮- 告诉的 Ludwig。
他们并且有站立大约14"高的二小类人动物叫做轻碰& 拍击声。 他们有Ludwig 电影。主要建造者是: Murray
Shanahan, Yiannis Demiris, 戴维・Randell, 和标记Witkowski 。 

Ludwig
轻碰& 拍击声 |
| 72. Tohoku 大学并且有一个 bipedal 走的机器人
项目。 这个项目是根据Takashi Emura 的教授方向在Emura 实验室。 他们有4 位教授和大约20
名学生。他们的目标是建立人类型自治机器人。 他们研究项目至少一年。下面是他们的bipedal 步行者的图象-
叫的门罗在Marilyn 门罗以后。  17KB 图象
17KB 图象
|
73. Politecnico 二Torino 有一个主要类人动物项目。 这称 Isaac 。 领导是Guiseppe Menga 教授并且7 名学生并且研究项目。 它有16 DOF 的Isaac 是大约61
cm (24 英寸) 高和称大约7 公斤(15 磅) 并且它被PC104 驾驶。他们的类人动物赢取了第2 个地方在Robocup 2003 年。
 Isaac & 队。
Isaac & 队。 |
| 74. 中国机器人宣布了2000 年12月1 日。这个机器人是1.4 米(55 英寸) 高和称20kg (44 磅) 。它被修造了在中国科学和技术大学为国防在长沙, 湖南, 中国。1990 年Aparently 他们建立了其它机器人后面。他们说"先驱" 能走和讲话在几种语言。看见在文章之上为细节。  先驱(14KB)
先驱(14KB) |
75. 在Goteburg 的Chalmers 大学, 瑞典 现在有3 个项目。他们有 现在 运作以他们的第二个原型的Elvis 项目, 并且新小走的机器人告诉的 Elvina。 他们的 职员 是大约13 。 

Elvis #2
Elvina |
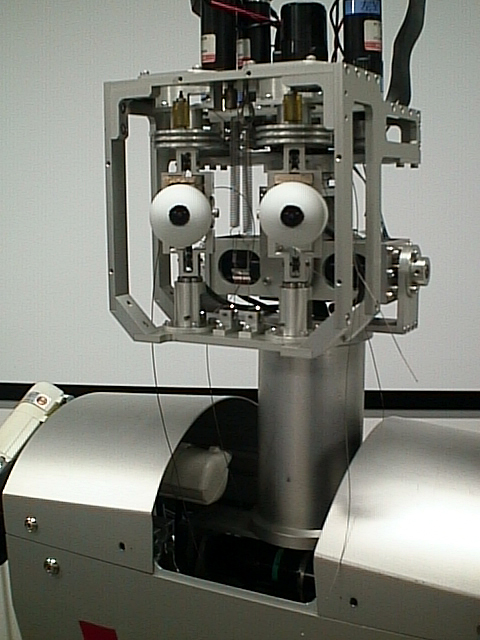
| 76. 麻省理工学院- 嵌齿轮项目
剑桥, 大量, 美国 这个项目开发类人动物也是。 他们的类人动物有一个头与四只眼睛(二为关闭和二为距离), 二条胳膊和躯干, 但它没有腿。他们有 二位教授和大约7 名学生。 他们并且要求大约10 名校友。项目负责人是Rodney 溪和林恩・斯坦。一些嵌齿轮最佳的pix 是在 Rodney 溪主页。下面是嵌齿轮和它的头特写镜头的图象(与4 只眼睛) 。 

|
76b 。 麻省理工学院腿实验室 建立了意欲很快结婚对嵌齿轮躯干的一套腿。腿, 称M2 项目, 以为特色在这个月的 架线的 杂志文章里关于机器人。(pgs 9月2000 年, 252 - 272) 。
 111KB
111KB |
| 77. 麻省理工学院有一个新项目称 Coco。它应该是一个小或或许小大猩猩。它有15 DOF 和称大约20 磅。椰树 是大约12"(30 cm) 正方形。 
|
78. 横滨全国大学有一个 bipedal 走的机器人
项目也是。这个项目是根据Atsuo Kawamura 的教授方向在Kawamura 实验室。他们有至少5 个 职员。他们的目标是建立人类型自治机器人。 他们研究项目至少一年。下面是他们的bipedal 步行者的图象。
 19KB 图象
19KB 图象 |
| 79. Fukuda 实验室 在名古屋大学有一个项目称 生物被启发的机器人系统(BIRS)。 他们的机器人看来是大约1.5 m 高和有20 DOF 。 他们有四位教授和 大约30 名学生的职员 从事它。
|
80。釜山, 韩国 韩国海大学实施中有一个主要bipedal 机器人项目。它看相当相似与一些日本项目譬如Tohoku 大学项目(参见#20 上面) 。 这链接- 用 韩国语 或 英语。

|
| 81. 这第一伊朗机器人。 这称 Firatelloid
(首先伊朗聪明的类人动物) 。他们有一些电影在他们的多媒体页。主要开发商是Mohamad Shayganfar 和本杰明・Fonooni 从Arak Azad 大学。 (Arak, 伊朗) 。
 Firatelloid 。
Firatelloid 。 |
82. 这 "无首的御马者" Pangbourne Castrol 摩托车公司, 英国。 机器人由Stahle Gmbh Neuhaussen, 德国实际上修造了。 
这个机器人有二条胳膊和二条腿和登上在摩托车。
|
| 83。 类人动物机器人学实验室 在Linz, 奥地利修造了 Barbot - 买啤酒在酒吧和喝它的一个似人机器人! 这是我看见了的第一类人动物哪些吃或喝任何东西。 他们采取建议关于怎样转换啤酒成力量跑机器人。它是1.7m 高和称和30 公斤。Barbot 有7 DOF, 可能被预定为您的党或事件。
 Barbot - Linz, 奥地利
Barbot - Linz, 奥地利
|
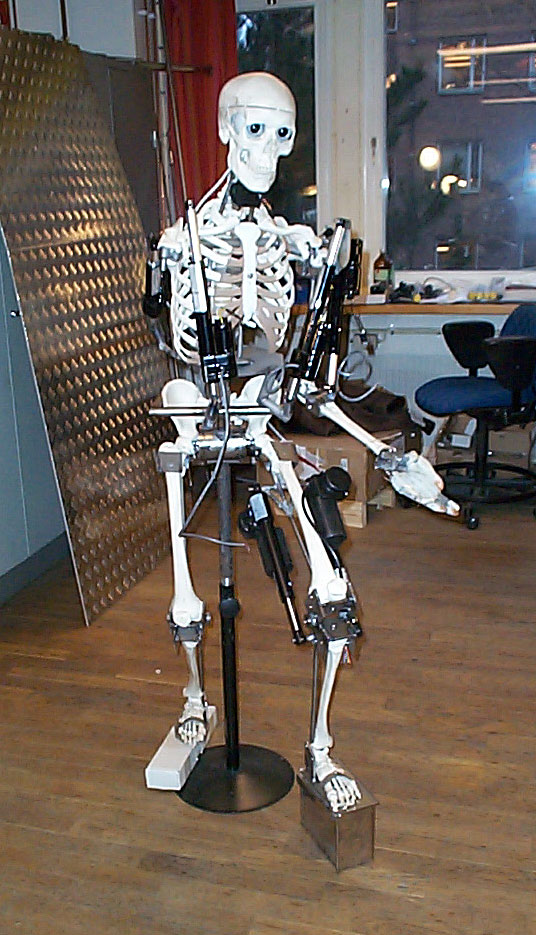
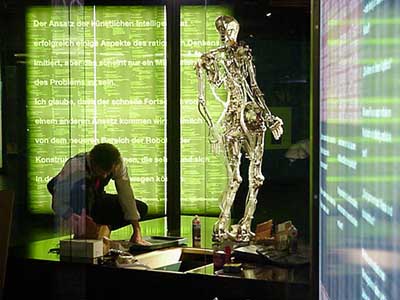
84. 慕尼黑 德国非晶性 机器人工作修造了他们称Skelli 的移动的人的 骨骼。
这是一个正常成人的大小和有34 DOF 包括16 在它的面孔。一套先进的测距术衣服将允许参加者教机器行为。设计反射公共以这个类人动物机器将体现是恐惧的人类, 一些表示, 愤怒、喜悦、哀痛、惊奇和心急。
 Skelli 与奇哥MacMurtrie
Skelli 与奇哥MacMurtrie
 Skelli 肩膀细节。
Skelli 肩膀细节。
|
| 85. Waseda 大学类人动物项目 有其它项目称"Wendy" 。 "Wendy" 与Halady 是相似。 它有一共计52 DOF 。 当心, 他们的文本是在白色, 因此它正确地不会打印- 至少在彩色打印机。 这Wendy 的图片。  图象是42K 。
图象是42K 。
|
86 。现在Waseda 大学有其它项目叫做 iSHA。这类人动物有26 DOF 被电动机主要驾驶。它可能自治经营2 个小时。哇! 非常印象深刻!
 iSHA 。
iSHA 。
|
| 87 。Waseda 有我最后发现) 的其它项目(告诉的 Robita。它被设计举办转换与人。 他们有几部电影在 Yosuke Matsusaka 的页。这个项目是活跃的从1999 年6月。
 Robita
Robita
|
88 。Waseda 大学并且有一个项目称
Wamoeba。 它被修造在Sugano 实验室。它似乎有是3 个版本自1995 年以来。图片如下是最晚- 告诉的Wamoeba 2Ri 。  Wamoeba - 2Ri
Wamoeba - 2Ri |
| 89. 类人动物机器人系统被开发在
科学和技术
韩国学院的聪明的机器人学研究中心在汉城, 韩国。目标是修造一个human-like 自治机器人。 这个项目的名字是 名骑手
- 在一半人的一半马以后从希腊神话- 并且它有4 条腿。当前的职员是14 。图片如下是人的上身零件。 他们并且有视觉眼睛协调项目 这里。 

|
90. 科学和技术韩国 学院的 Articifial 智力和媒介实验室
现在有二个项目在developement 之下。他们有 目标项目和AIMET 项目。 他们被开发 在Taejon 校园在Taejon, 韩国。 他们有一些录象剪辑看也是。


目标 AIMET (被留下), 目标(中心)
|
| 91. 佛罗里达大学 有类人动物项目在他们的 机器智力实验室, Gainsville,
佛罗里达。 他们的类人动物称 Pneuman。教授包括是:
Antonio 小溪, 迈克尔・Nechyba, 埃里克・Schwartz 。有并且 许多学生研究项目。类人动物是59 英寸高, 称102 磅和有25 DOF 。这 我发现 的其它文章。
 Pneuman 。
Pneuman 。 |
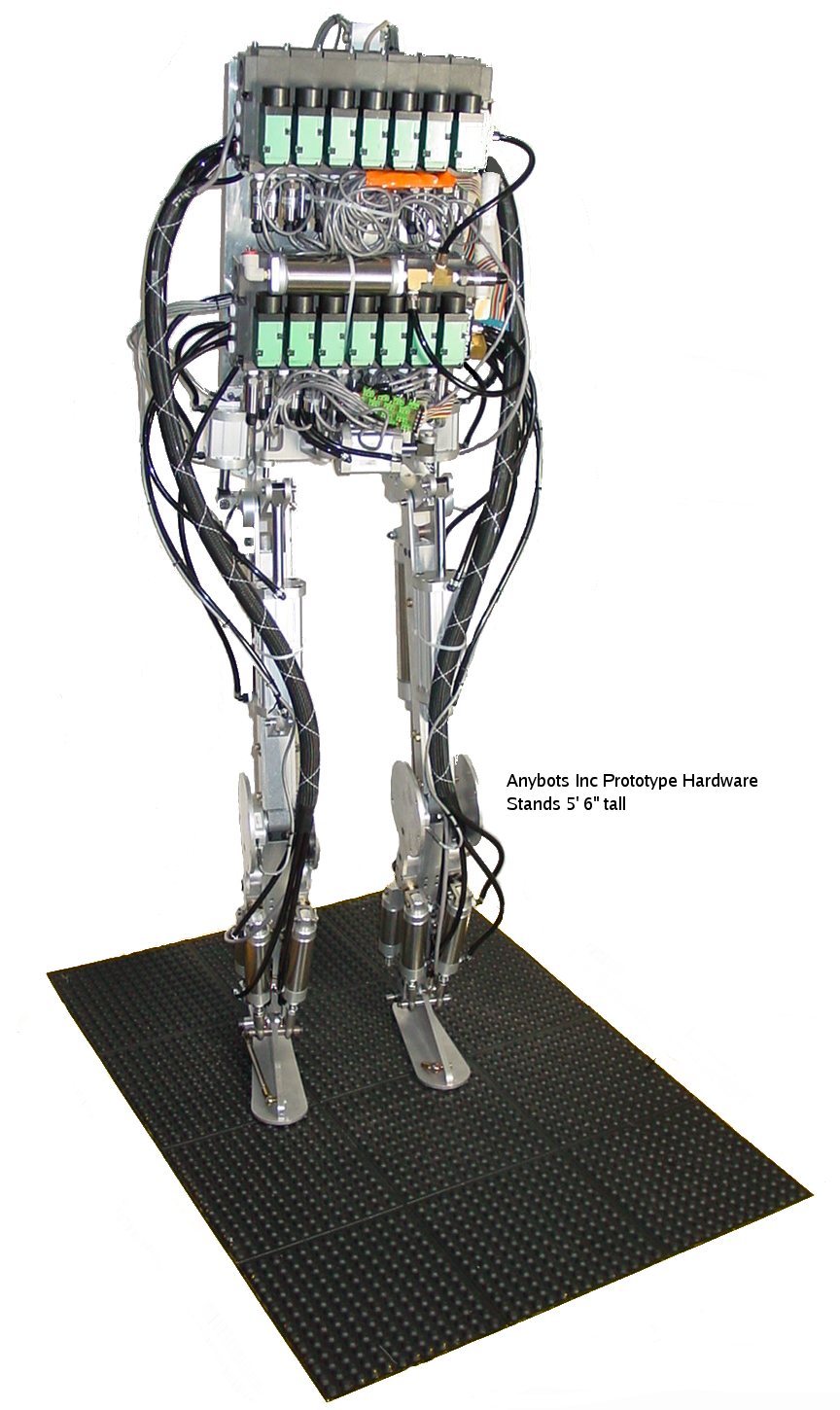
92。 山景, 加利福尼亚Anybots 实施中有一个 全方位类人动物项目。 看起来, 各条腿有7 DOF 。 他们有他们的腿录影垂直平衡。 他们并且有手原型。

|
| 93. 卡尔斯鲁厄大学在德国有一个
大项目称SFB 588, 类人动物机器人。 他们的机器人没有腿但是看起来有非常可胜任的手与大约15 DOF 为各只手。 因而整体数字会是在40 &
50 之间DOF 。 
 精密手。
精密手。 |
94. 测量科学学院在慕尼黑(德国) Bundeswehr 大学有一个大项目称 Hermes。我的appologies 对他们为从前不列出他们。这个项目去自1996 年以来。主要调查员是Rainer Bischoff 并且有7 个 其它职员
和大约35 过去职员和学生研究项目。他们获得了好进展。 
|
| 95. 卡内基梅隆大学(CMU) 并且匹兹堡大学开始了一个主要项目称 Nursebot, 以一个$1.4 百万津贴从国家科学基金会。 这看来是巨大的因为他们有 多达50 个人从事 各种各样的部份的它。他们似乎有二个原型: 珍珠和佛罗伦萨。它的大约4 英尺高。  50 KB
50 KB
|
96. Tamim Asfour, 一名毕业学生在卡尔斯鲁厄(德国) 大学, 是修造类人动物称ARMAR 一个主要项目的一部分。职员的数字: 未知数对我。 
ARMAR - 124K
|
| 97. 马萨诸塞大学在阿默斯特有类人动物项目在 实验室为感知机器人学。Roderic Grupen 教授是主任。 他们有 四位教授在项目和大约20 名学生。 他们建立了类人动物的上半方- 相似与麻省理工学院& Vanderbilt 。他们的类人动物有大约29 DOF, 包括2 条功能胳膊(7 DOF 每个) 并且二3 只手指的手(4 DOF 每个) 。
 UMass 类人动物。
UMass 类人动物。
|
98. Vanderbilt 工程学大学学校有类人动物机器人称 ISAC
在发展中。 这个项目有四位教授和23 名学生。项目是实施中为大约5 years.Their 当前的目标是使ISAC
从他自己的经验学会和与人相处融洽用一个自然方式。最后, ISAC 将是一个在家关心送礼者为年长或不牢固。
中心的主任聪明的系统的是Kawamura 教授。他们的职员包括Profs 。Peters 、Wilkes 、Biswas, 和Gaines 。
 46KB 图象
46KB 图象
|
| 99. ProtoAndroid 项目 (奥斯汀, 得克萨斯) 这个项目由Faustex Systems Corporation 提供经费, 创建者和总统是大卫Santos 。这个项目是在发展中从至少1992 年。 这是 6' 4" 高和称大约300 磅。职员的大小是大约5 。他们并且修造了 H2 武术机器人
下面被显示。
 116K 。
116K 。 |
100. 泰国现在有它的第一个机器人项目。 Mongkut 的University 国王技术在Thonburi 修造机器人也是。 
|
| 101. 开始, 1996 年
Aandroyds 公司
提供2 个, 4 个, 和6 个有腿的机器线待售。机器被设计为家、办公室, 和产业, 以习惯实验室和空间模型可利用。发现他们在 Aandroyds.com。 |
102. 詹尼弗・Best 博士在加州大学洛杉矶分校带领一个新 机器人发展项目 。他们的 主要网链接
不能运作因为他们的服务器是下来。您也许尝试 这一个。与一所主要学校喜欢加州大学洛杉矶分校支持这个项目, 我是肯定的我们能期待巨大事。 |
| 103. 技术Kumoh 全国大学 在汉城, 韩国有修造一个微型类人动物机器人的一个项目。它由是机械工程部门的一部分的mechatronics 小组修造。他们声称他们的类人动物机器人可能走在台阶上下。哇! 这我发现的两三张纸。 [ 1 ] Y. W. Sung, 和S. Y. 伊, "可能走在台阶上下" 的一个微型类人动物机器人, Proc 。国际专题讨论会在Robotics'2001, 汉城, 韩国2001 年
[ 2 ] Y. W. Sung, 和S. Y. 伊, "一个微型类人动物机器人系统的发展", Proc 。国际专题讨论会在机器人学和自动化2000 年, 蒙特雷, 墨西哥, pp.133~138 2000 年
|
104. 在北京的
Tsinghua 大学, 中国有一个bipedal 类人动物机器人项目告诉的THBIP-I 。 这个项目是几年年纪。 这 一篇新闻文章。 这我发现的几张纸: [ 1 ] "Biped 类人动物机器人THBIP-I" 李・刘,
Jinsong Wang, 肯・陈, 江东赵和Dongchao 杨(Tsinghua 大学, 中国)
[ 2 ] "类人动物机器人步态计划根据Anticipant ZMP Tranck" Dongchao 杨, 李・刘, Jinsong Wang, 肯・陈(Tsinghua 大学, 中国)
[ 3 ] "步态世代一个新方法为一个Biped 走的机器人" Kai 徐, 肯・陈, Jinsong Wang, 李・刘, Dongchao 杨, 江东赵
制造业工程学学院, Tsinghua 大学, 中国 |
| 105. 聪明的地球, 公司位于Kirkcaldy, 苏格兰, 宣布一个新项目修造一个充分大小的走的和谈的机器人。公告发表了 在这篇新闻文章的结尾从BBC 。
 Doki Doki
|
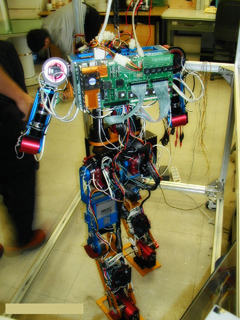
106. Freiburg 大学 在 Freiburg, 德国 开始了一个学习的类人动物机器人项目于1月2004 年。
项目, 称Nimbro, 由Sven Behnke 指挥, 将涉及大约12 个人。 他们修造将是大约150 cm 高的类人动物(5
英尺) 并且将称大约38 公斤。 它将有22 DOF 。 他们会想竞争在Robocup 类人动物足球比赛。
|