|
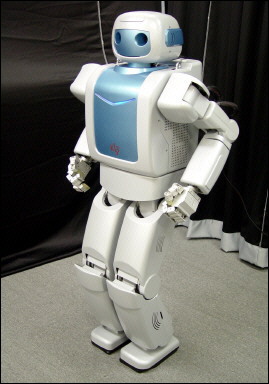
1.
L'institut national de la Science et de la technologie industrielles
avancées (AIST) du Japon en même temps que des industries de Kawada a
maintenant libéré
le
humanoid de HRP-4C. Ce humanoid tient 1.58 mètre de grand (62" ;) et
pèse 43 kilogramme = 95 livres. Il peut marcher lentement et des
ressembler à une jeune dame. Elle a 30 DOF et se vendra pour environ 20
millions de Yens ou $200.000.
Quelques vidéos sont ici.

 > > |
2. Kokoro et université d'Osaka ont développé un nouvel Actroid appelé androïde
réaliste DER3 (successeur de DER2). Ces androïdes regarde très l'humain et
l'entretien et déplace leurs têtes, bras, mains, et corps.
DER2 (lien d'article) (lien d'emplacement) (lien de youtube)
DER3
(lien d'article) (lien d'emplacement) (lien de youtube)


|
|
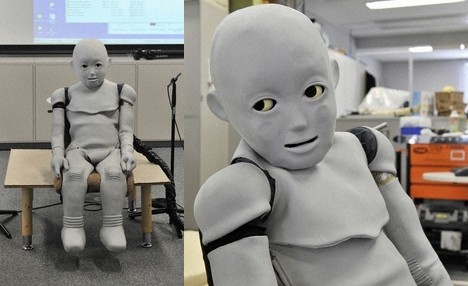
3. Le projet de JST ERATO Asada et
l'université d'Osaka ont
construit un CB2 appelé androïde enfant-classé (robot d'enfant avec le corps
biométrique). Il est 130 cm. grand, pèse 33 kilogrammes., et a 56 DOF. Il a des
appareils-photo pour des yeux et des microphones pour des oreilles. Il a
également 197 sondes tactiles incorporées dans la peau de silicone.
Page androïde.
Lien 1 ;
Lien 2 ;
Lien 3 ;
vidéo 1 ;
vidéo 2 ;
vidéo 3 ;


|
4. Le consortium de Cub de robot (11
organismes européens) ont construit Robot Cub appelé par humanoid classé par
enfant très sophistiqué. Ce humanoid a 53 DOF, tient 104 cm grands, et pèse 22
kilogrammes. Plus de 40 personnes à 11 établissements à travers l'Europe ont
développé ce humanoid. Il y a deux vidéos
ici et
ici.


|
|
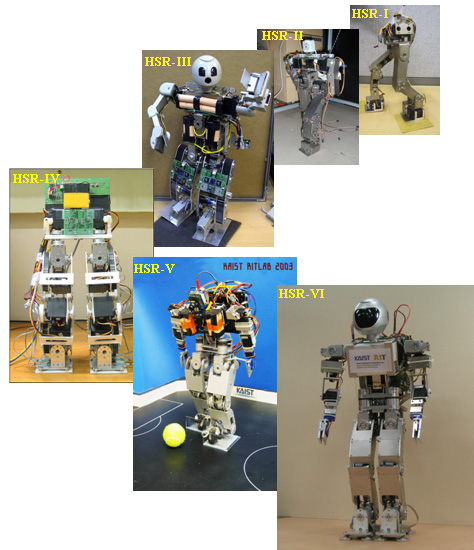
5. KITECH (institut coréen de technologie industrielle) a présenté un autre
androïde appelé l'EveR-3. Elle est de 1.57 m de grande (5' ; 2" ;) et pèse 135
livres (60 kilogrammes) et est capable de 16 expressions faciales. Elle a 35 DOF
dans son corps supérieur.
(lien d'article) (lien d'article) (lien de youtube) (lien de youtube)


EveR-3 |
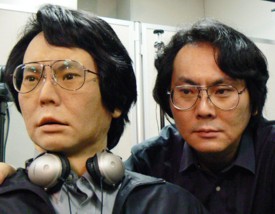
6a. Prof. Hiroshi Ishiguro d'université d'Osaka a eu un robot de doppelganger
fait en se. Ishiguro est le même professeur menant l'équipe qui a établi
l'actroid (voir ci-dessous) et l'actroid DER et l'actroid DER2 (montré
ci-dessus). Cet androïde a 46 degrés de liberté. Il y a plusieurs videos
disponibles ici. Une autre nouvelle est ici.

6b. Doppelgangers deviennent populaire. Voici un de Zou Renti (l) qui a été
montré à l'Expo 2006 de robot de la Chine tenue récemment dans Pékin.

|
|
7. Osaka University & Kokoro Inc. ont produit une version
améliorée du humanoid d'Actroid appelé
Repliee Q1 pour 2005 Expo mondial qui continue maintenant à
Nagoya, Japon. Repliee Q1 a la peau
et les regards de silicium très humains pendant qu'elle s'assied et
des gentures à vous. Ce robot a 41 DOF (contre 31 pour
Actroid).
 < = Repliee Q1
< = Repliee Q1
|
8. Un autre groupe coréen à KITECH a produit
un androïde qui est infiniment comme Repliee-Q1. Ce
s'appelle EveR-1. Il est
environ 1.6m grand et pèse environ 50 kilogrammes. L'équipe, dirigée par Baeg Moon-hong-hong, un
chercheur aîné à l'institut de la Corée de
la technologie industrielle, jeudi (5/4/06) ont
pris les enveloppes outre de l'androïde femelle, appelé EveR-1,
pendant une exposition au centre de culture d'éducation de Séoul.
Baeg, qui a dépensé juste 3 milliards a gagné (3.16M USD)
en créant EveR-1 en année, regarde pour excéder ses rivaux japonais
en faisant au mouvement modèle quatre membres par tard cette année.


EveR-1 KITECH
|
|
9. Nouveau humanoid d'Asimo Honda a présenté leur humanoid mis à jour d'Asimo.
C'est de 130 centimètres de grand, pèse 54 kilogramme = 119 livres,
et a 34 DOF. Voici
une vidéo intéressante.

|
10. Voici
Aiko qu'un
humanoid très anthropomorphe a construit par Le Trung (Brampton, ON,
Canada). Elle a actuellement 23 DOF dont 10 sont dans des ses doigts.
À l'avenir elle aura 12 plus de DOF. Elle est de 1.52 m de grande,
mais ne peut pas comique toute seule encore. Trung a quelques
vidéos ici. Le
grand travail en seulement un an !

 > >
Aiko
with Trung> |
| 11. Les rêves de Kokoro et l'université
d'Osaka ont annoncé une séance nov. androïde 19, 2003 à l'exposition internationale 2003 de robot à
Tokyo. Cet androïde s'appelle Actroid
et il est TRÈS réaliste. Spécifications d'Actroid:
>Le système se compose de trois unités séparées
: Pièce de Humanoid: >Taille = 1.3m ;
>largeur = >0.42m ; >longueur se reposante = >0.725m ; >poids = 30 kilogrammes. >L'androïde a 31 DOF. >Il actionne l'air dessus comprimé et
l'électricité (120w). Unité de commande:
>Taille = 0.6m ; >largeur = 0.75m ; >longueur = 0.6m ; >poids = 40 kilogrammes ; >contient l'ordinateur principal. Unité de compresseur:
>Taille = 1.37m ; >largeur = 0.9m ; >longueur = 0.9m ; >puissance
d'énergie = 3.7 kilowatts ;
>bruit < DB 50.
|
Voici un film d'Actroid. Voici un autre
article concernant Actroid.


Actroid
avec des amis. |
|
12. La Chine a présenté Dion appelé androïde chanteur. Tandis qu'elle
n'est pas presque aussi avançée que l'Actroid montré ci-dessus, elle est très
réaliste. C'est un androïde debout vie-classé avec une forme très féminine.
L'histoire et la vidéo sont ici.

|
13. L'institut de l'automation de l'académie chinoise de la Science dans Pékin
a présenté un nouveau humanoid femelle appelé Rong Cheng août 7, 2006. Ce
humanoid est de 168 centimètres de grand et pèse 60 kilogrammes. Le concepteur
primaire était Yue Hongqiang et son équipe a pris un an pour établir ce
humanoid à un coût de $37.500 (Yuan 300.000). Rong Cheng sera envoyé au musée
de la Science de Sichuan dans Chengdu où elle sera une réceptionniste et une
guide d'excursion pour le musée.
D'Article
D'Article
Vidéo (Quicktime)


|
| 14.KIST a juste présenté la bonne de robot de Mahru-Z (2010). Il
est 130 cm. grand, pèse 55 kilogrammes, et a 3 doigts sur chaque main. Elle a 35
DOF.
Lien 1 ;
Lien 2 ;
Lien 3 ;
vidéo 1 ;
vidéo 2 ;

 Z (right)
Z (right)
|
15.KIST a présenté le Mahru-R en 2009. Il est 145 cm. grand,
pèse 67 kilogrammes., et 35 DOF et a 3 doigts sur chaque main et marche à 2.6
kilomètres. /hr.
Lien 1 ; vidéo 1 ;
vidéo 2 ;

|
| 16.KIST a présenté le Mahru-M en 2008. Il est environ 150 cm.
grand, pèse 62 kilogrammes., et roule autour sur des roues. Probablement environ
20 DOF.
Lien
1 ;
M (left)

|
17. Choromet (HRP-2m) est un humanoid de fantaisie de jouet. Il
est 35 cm. grand, pèse 1.5 kilogramme., et a 20 DOF. Son coût est environ
500.000 Yens ($4.400). Choromet peut se coucher et comique par lui-même. Il peut
également se tenir sur une jambe. Il emploie un Linux du système d'exploitation.
Choromet a été développé par l'institut avancé par Japon de la Science
industrielle et de technologie (AIST) et 4 entreprises privés anonymes.
Lien
1 ; vidéo 1 ;
 |
| 18. E-nuvo est des 126 cm. humanoid grand construit par
l'Institut de Technologie du Nippon. Il pèse 15 kilogrammes., et a un total de
21 DOF. Il emploie la puissance de batterie d'ion de lithium.
Lien 1 ; vidéo 1 ;

|
19. TOM-7xp est un nouveau humanoid (le janvier 2010) développé
par Dan Mathias chez FutureBots au cours des 8 dernières années. Il est 158 cm.
grand, pèse 73 kilogrammes., et a 49 DOF (10 y compris pour la tête et 10 pour
les mains).

|
| 20. La technologie de pal des EAU (Emirats Arabes Unis) a annoncé un nouveau
humanoid très sophistiqué appelé REEM-A. Elle tient 1.45 m de grand, pèse 41
kilogrammes et a 30 DOF (degrés de liberté). Leurs spécifications sont
ici. Il y
a quelques videos gentils ici.
 >
>
|
21. Kawada a maintenant libéré le humanoid de HRP-3P. Ce robot tient 160
centimètres de grand et pèse 65 kilogrammes. Il a un total de 36 degrés de
liberté. La page du HRP-3P de Kawada est (dans le Japonais naturellement)
voici
ici un article d'Engadget. Voici les pleines spécifications de HRP-3P avec un
bon nombre d'images gentilles. Voici le communiqué de presse d'AIST.


|
|
22. Tmsuk du Japon a produit un nouveau robot qu'ils appellent Kiyomori. Ils
ont leur propre site Web avec des videos ici. Kiyomori est présenté en tant
que guerrier Samouraï. Cette vidéo de Youtube le montre marchant.

|
23. JVC a libéré un nouveau petit robot de humanoid appelé J4. Il tient 20
centimètres de grand et pèse seulement 0.77 kilogramme mais il a 26 degrés de
liberté. Voici une présentation gentille de Plyojump.


|
|
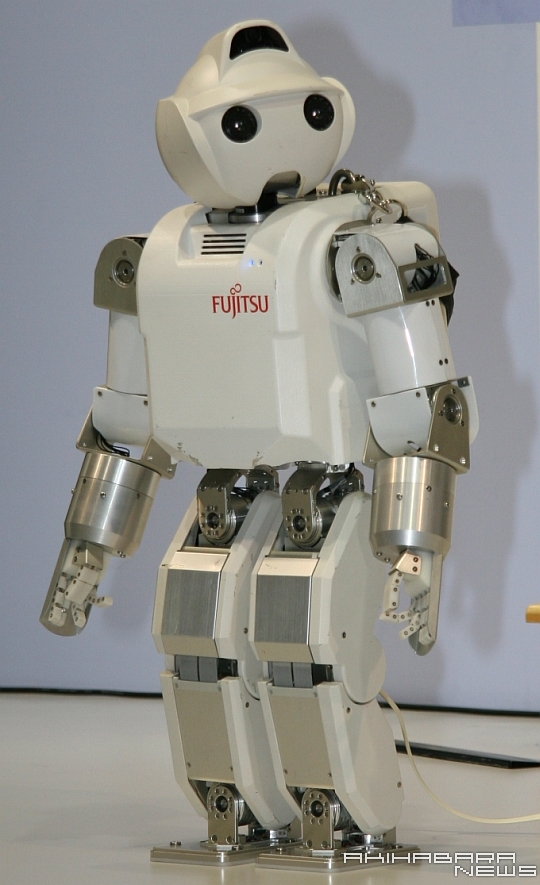
24. Fujitsu a maintenant libéré le HOAP-3. Ce petit humanoid tient 60 centimètres
de grand et pèse 9 kilogrammes. Voici un
article. Ce humanoid a 28 degrés de
liberté et emploie un processeur de Pentium de 1.1 gigahertz courant Droite-Linux.


|
25. Un groupe britannique a produit un robot de exécution appelé
Robothespian. Ce projet a
commencé en janvier de 2005. Robothespian a environ 30 DOF, tient 175 cm grands
(plus le stand de 18 cm) et pèse 33 kilogrammes. Cet acteur de robot est
maintenant disponible pour 55.000 livres (US$ 85.000, ou Yens de 7.9M). Il y a
deux vidéos ici et
ici.


|
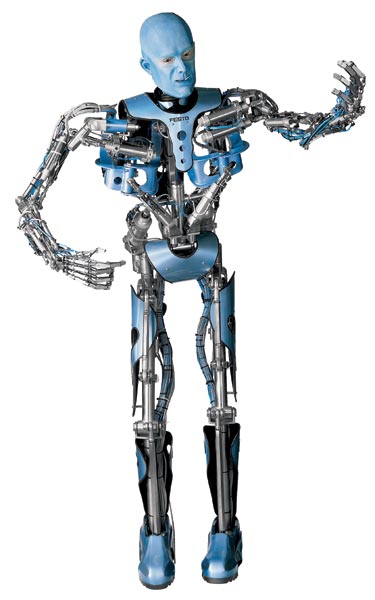
| 26. Fesco, les experts en matière de système pneumatique,
ont construit
un Tron appelé androïde énorme X. Cet androïde tient environ
2.8 m (9 pieds) de grand et pèse environ 300 kilogrammes (660 livres).
Il est actionné près plus de 200 cylindres pneumatiques de
toutes les différentes tailles.
Aparently cet androïde a été construit en Australie en 1997.
Peut-être le modèle courant est une deuxième version ? ?


Tron-X - 200+ DOF
|
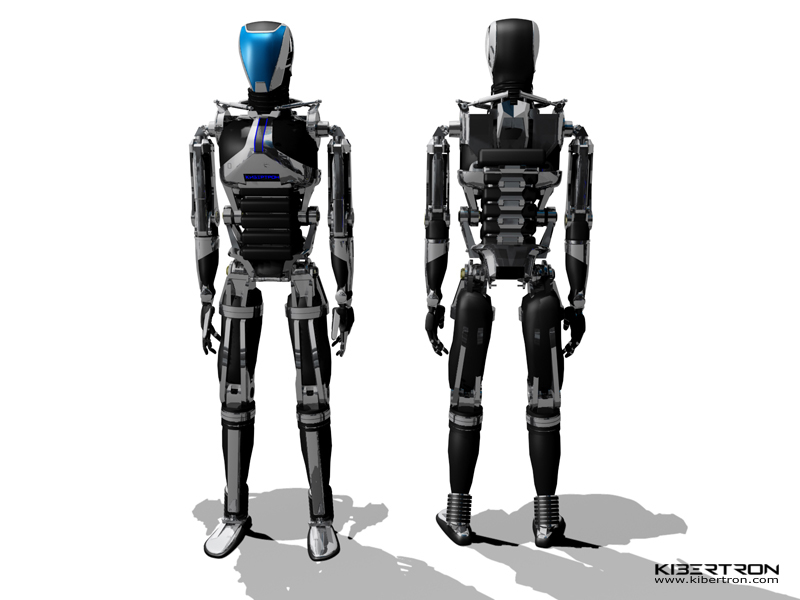
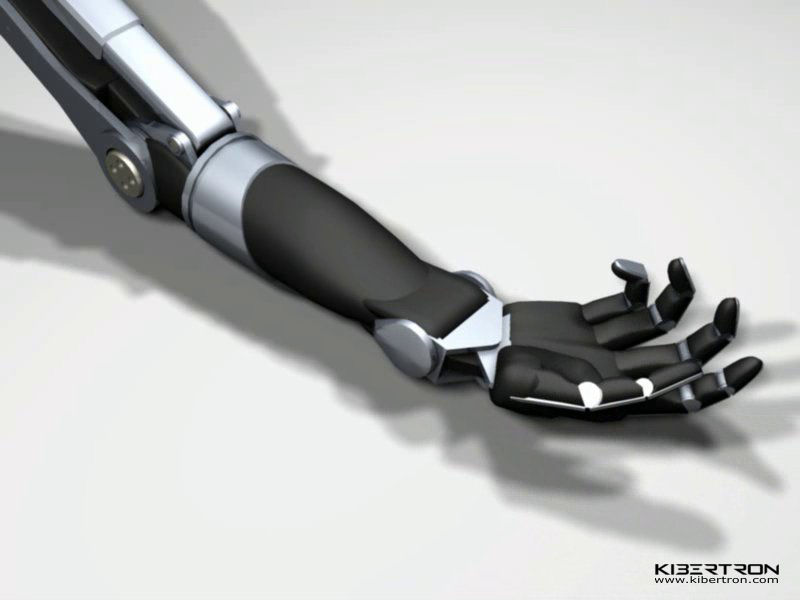
27. Une compagnie a appelé Kibertron Inc, situé à Sofia,
Bulgarie a un projet complet de humanoid appelé Kibertron. Leur humanoid ressemble
à un terminateur. Il est 1.75m grand (5 '9") et pèse 90
kilogrammes (200 livres). Elles ont un
personnel de 23. Kibertron a 82 DOF que beaucoup. Les mains ont 20 DOF chacun et les bras ont 8 plus de
DOF pour un total de 28 pour chaque bras et main. Voici leur contour de projet.


bras et main avant et arrières
|
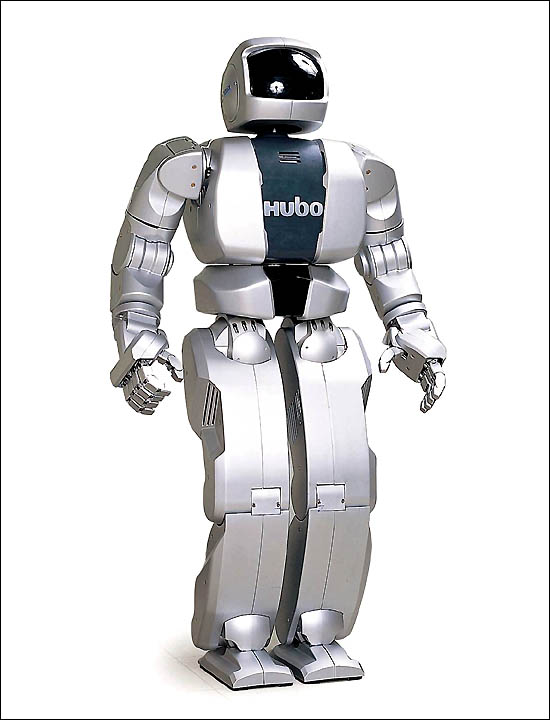
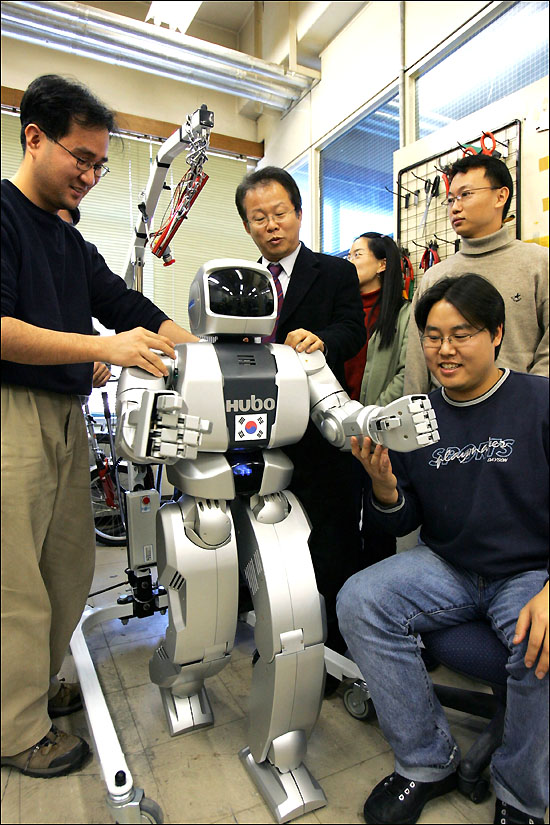
| 28. KAIST annoncé janvier 6, 2005, un nouveau humanoid qu'ils
appellent HUBO. Le chef de projet est professeur Juin-ho OH, qui a été
également appelé "KAISTian" de l'année. Leur humanoid
a 41 DOF, tient 1.25m grand (49") et pèse environ 55 kilogrammes (121
livres). Leur androïde peut marcher, parler, et
comprendre la parole. Ce robot marche à un taux de 1.25
km/hr. Clairement la Corée est contagieuse vers le haut dans la
course de développement de humanoid du monde. Ce groupe
est situé dans Daejeon, Corée.


Marche
de Hubo
Hubo peut déplacer ses doigts indépendamment
(tandis qu'asimo ne peut pas). Voici un couple plus d'articles : Nouvelles et Theautochannel
de Chosun.
|
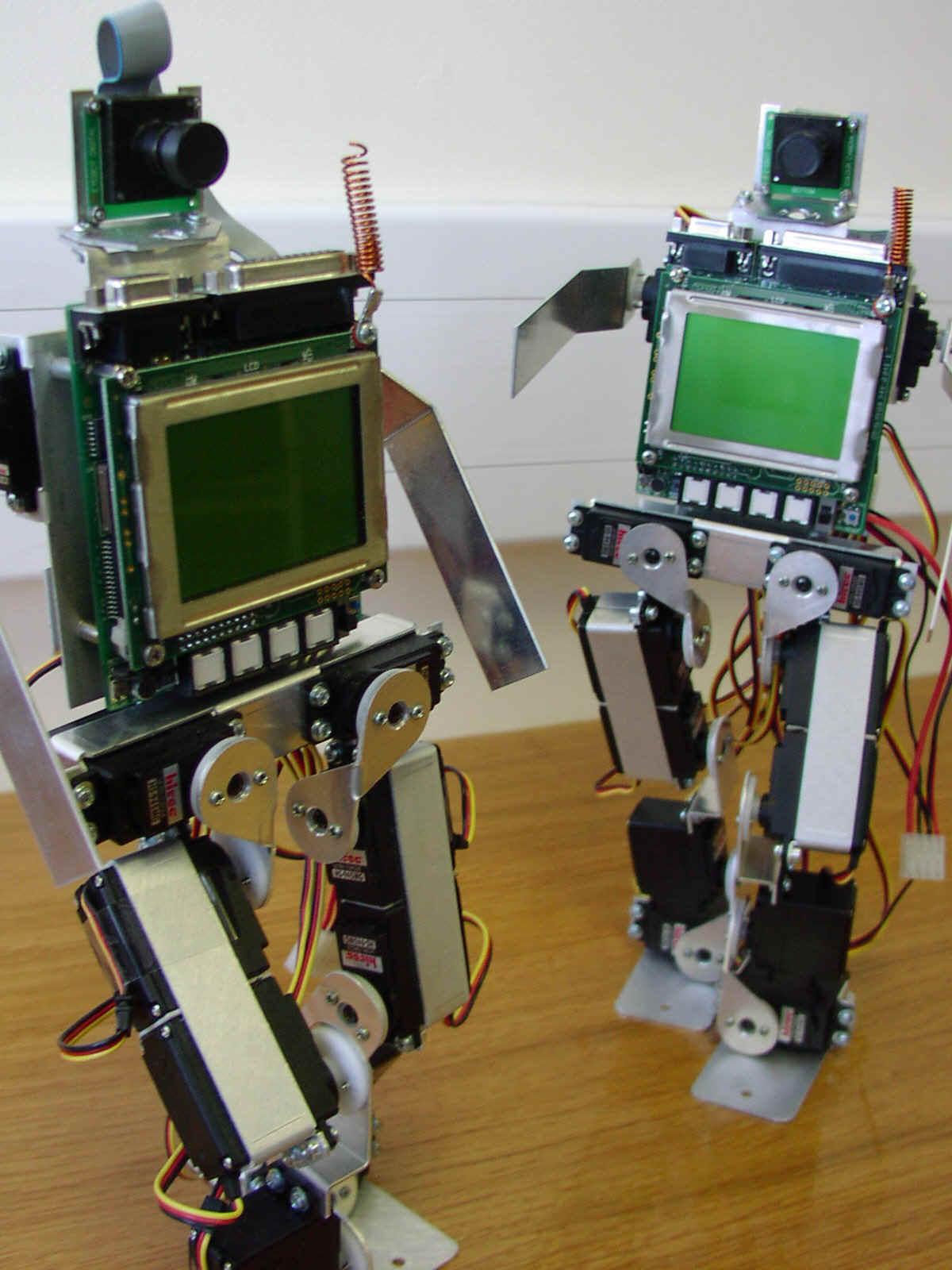
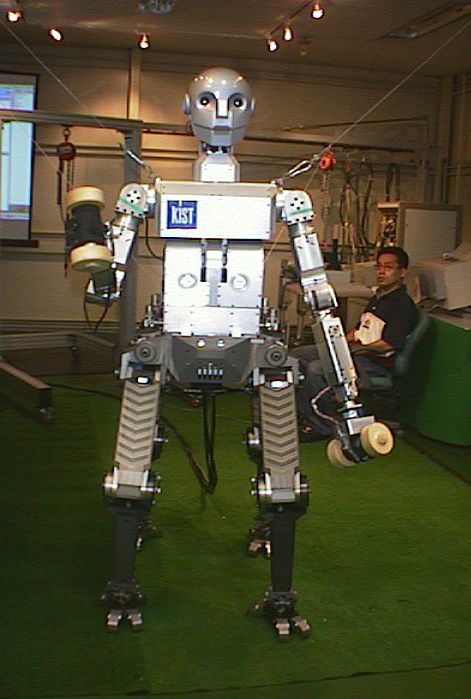
29. KIST a établi deux humanoids appelés
Mahru (mâle) et Ahru (femelle)..
L'équipe de développement est fil par Bum-Jae-Jae You. Ce groupe réclame leur
humanoid est le humanoid d'abord réseau-basé du monde. Il pense comme un
humain et apprend comme un humain. Il tient environ 1.5m grand (60") et pèse
environ 67 kilogrammes (147 livres). Il peut marcher, parler, et comprendre la
parole. Il marche à 0.9 km/hr. Il a 35 degrés de liberté. L'équipe
travaillent maintenant à Mahru II qui sera libéré en 2009.


Mahru
Mahru II
|
| 30. Septembre 10, 2001 les
laboratoires inc. de Fujitsu ont annoncé leur jouet HOAP-1 appelé
androïde, un androïde 18"grand de 13 livres avec
20 degrés de liberté. Le coût est $41.000 ou 4.8 millions de
Yens. Maintenant ils ont annoncé un autre androïde appelé le HOAP-2. Son taille à peu près identique.


HOAP-1 HOAP-2
|
31. Sur septembre 19, 2003 Sony a annoncé
un autre petit humanoid appelé QRIO. Son tout à fait semblable au SDR-4X. Il peut marcher mieux et peut récupérer des chutes
mieux.
 QRIO
QRIO
|
| 32. Sony a présenté le
SDR-4X pour Robodex 2002 . Grand nouvel
androïde à concurrencer le HOAP-1. Films. Beaucoup d'images. Article et plus d'images. 
|
33. Kawada Industries Inc. a
présenté le HRP-2P pour
Robodex 2002.
Ce humanoid semble être très
impressionnant. C'est de 154 centimètres (60") de grand, pèse
58kg (127 livres) et a 30 DOF. Voici un
dégagement de nouvelles (dans le Japonais).
Notez le MANQUE d'un paquet de batterie. Voici une nouvelle histoire au sujet de HRP2. Il y a un nouveau
lien à quelques videos de HRP-2 dans l'action.
 
|
| 34. Un robot dentaire de formation appelé Simroid a été présenté par Dr.
Naotake Shibui, de l'université dentaire du Nippon à Tokyo, qui a collaboré avec
des techniciens chez Kokoro Cie. pour développer le robot. Ce regarde des cris
aigus très humains et égaux en douleur quand le stagiaire fait une erreur.
 Simroid >
Simroid > |
35. Toyota Motor Company a maintenant présenté un humanoid qui peut jouer le
violon. Ceci montre une amélioration dans la dextérité des doigts. Ce robot
tient 1.52 m de grand et il a 17 joints dans ses bras et mains.
La vidéo du
robot jouant la "splendeur et la circonstance # 5" par Elgar est ici.

|
| 36. Toyota Motor Company a annoncé leur longue SUITE attendue des androïdes mars 11, 2004 à Tokyo. Ils projettent 4 modèles (montrés sur présentes et
les 3 prochaines les entrées) qu' ils s'appellent les
robots d'associé et sont conçus pour fonctionner comme aides
personnels pour des humains. Le premier est la version de marche. Cet
androïde est 1.2m (4') grand et pèse 35 kilogrammes (77 livres). On le prévoit pour aider les personnes âgées.

Page japonaise
|
37. Plans de Toyota pour montrer leurs
androïdes pour la première fois à l'exposition
2005 d'EXPO de l'harmonie
globale ce qui aura lieu l'année prochaine (à partir mars de 25,
2005 septembre à 25, 2005 dans Aichi, Japon. Le
deuxième modèle est la version de
roulement. Ce humanoid roule autour sur des
roues mais a un corps supérieur humain-regardant. On le
prévoit pour la fabrication. Il est 1m (40") grand et
pèse également 35 kilogrammes (77 livres).

Page japonaise
|
| 38. Modèle de Toyota le
troisième est facilement le robot le plus peu
commun du groupe. Ce modèle
s'appelle la version montable. C'est fondamentalement une chaise qui peut MARCHER! DÉFAUT DE LA REPRODUCTION SONORE ! Quel
concept ! Il tient 1.8 m (6') de grand et pèse 75
kilogrammes (165 livres). Notez que la personne dans la chaise
porte une casque antichoc. On espère que le casque ne
sera pas nécessaire.

Page japonaise
|
39. Le quatrième modèle produit par
Toyota est une version
fil-actionnée. Aucune donnée n'a
été donnée au sujet de sa taille ou poids. Il est
plus léger que les autres et peut se déplacer plus rapidement. Toyota a des films de leurs robots dans
l'action sur leur emplacement.

Page japonaise
|
| 40. Deux nouveaux
humanoids ont appelé ARNE et ARNEA ont été annoncés août 5, 2003
en Russie. Ils ont été construits par une rue
Petersburg New appelé par compagnie Era et étudiants de
l'université d'école d'enseignement technique de rue Petersburg.
Ces humanoids tiennent 1.23 m (4') de grand et pèsent 61
kilogrammes (134 livres). Ils ont 28 DOF. Le
projet, fil par Alexandre Yakovlev du secteur technique de robot de la
nouvelle ère, avait fonctionné pendant deux années.

|
41. Kawasaki Heavy Industries, construction de Tokyu
Cie., Ltd, institut national de la Science et
de la technologie industrielles avançées ("AIST"), et Honda ont un nouveau projet appelé HRP-1S. Le humanoid a été établi
par Honda et le logiciel de gestion a été développé par l'AIST. Cet article montre le humanoid actionnant une
pelle rétro. Nous supposons que le humanoid
a le même nombre de DOF qu'asimo ou P3 de Honda.

|
| 42.
l'institut de Pékin de la technologie
a un autre projet de humanoid maintenant qui s'appelle BHR-2. Ce
humanoid s'appelle "Huitong",
l'enfant. C'est de 160 centimètres de grand et pèse environ 63
kilogrammes. Peu l'autre information a été libéré, mais nous supposons à
a au moins 32 DOF et a été probablement développés par le même groupe
qui a développé BHR-1.
 BHR-2
BHR-2
|
43. KAIST a un autre effort principal de développement de humanoid au
laboratoire de RIT (technologie
d'intelligence de robot) dans Daejeon, Corée. Le chef de projet est
professeur Jong-Hwan Kim. Ils ont environ 15 personnes travailler sur le projet
et ils ont construit une série de 6 ou 7 robots de humanoid le plus en retard
de ce qui est le HSR-VI HanSaRam
également appelé. Il a 25 DOF se composer de 12 moteurs de C.C et de 13
moteurs servo.
 HSR
HSR
|
| 44. L'institut de Pékin de la
technologie a un grand projet de humanoid appelé BHR-1.
Cet androïde est de 1.58 m (5 '2") de grand et pèse 76
kilogrammes (167 livres). Il a 32 DOF. Il peut marcher à
1 km/hr avec des étapes de 33 centimètres. Le chef de projet
est prof. Li Kejie.Other que le personnel incluent Qiang Huang,
Yuechao Wang, bronzage minimum, Tianmiao Wang et Jinsong Wang. Cet androïde semble être très avançé et aussi
semblable à plusieurs des androïdes japonais montrés ci-dessus.
 BHR-1
BHR-1
|
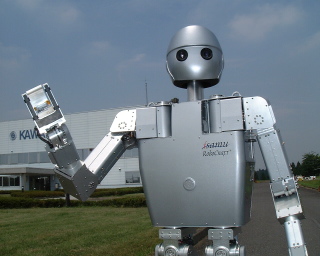
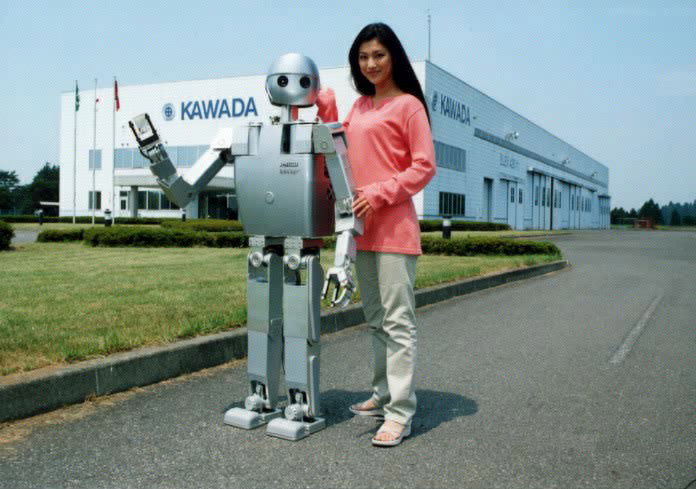
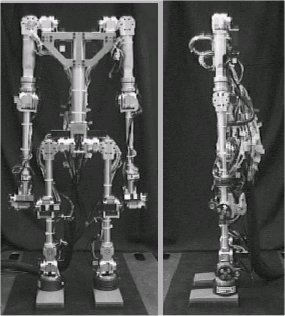
45. L'avion et la Division
mécanique de systèmes des industries inc. de Kawada. a construit l'androïde H7 pour Univ de Tokyo.
Ils ont maintenant lancé un projet de leur propre employer une
partie de la même technologie à partir de H6 et de H7. Son
Isamu appelé. 

Isamu est de 1.5 m (5') de grand et 6
m de large et pèse environ 55 kilogrammes (121 livres). Il a 32 DOF et vous pouvez voir que la tête est plus
anthropomorphe que H6 ou H7.
|
|
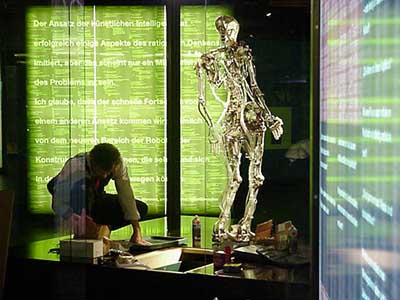
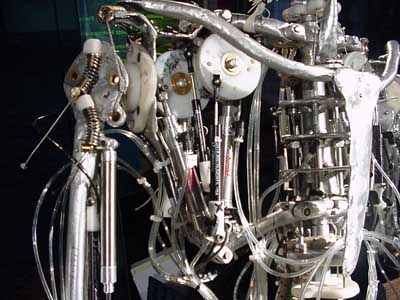
46. Le robot d'ECCE (connaissance incorporée dans un robot
conforme machiné) est un humanoid peu commun parce que les muscles et le
squelette sont modelés après notre squelette et muscles humains. Il a été
construit par un consortium d'universités comprenant Université d'Essex,
université du Sussex, université de Zurich, université de Belgrade, université de Munich, et
le studio de robot . C'est un avantage supplémentaire
du projet de Cronos. Il a
80 DOF. Il a été présenté le 11 août 2009.
vidéo 1 ;
vidéo 2 ;

|
47.Les industries de Kawada ont présenté le robot
de nextage le
19 novembre 2009. Il est très bien conçu et semble grand. Il a 15 DOF et peut
soulever des charges utiles de 1.5 kilogramme.
vidéo 1 ;
vidéo 2 ;


|
|
48. L'université de Téhéran (Iran) a présenté un robot intéressant appelé le
Surena-2. Ce robot ressemble à de nombreux robots dans cette liste. C'est de
1.45 m de grand et pèse 45 kilogrammes. Il a 22 DOF (12 dans des ses jambes, 8
dans des ses mains, et 2 dans sa tête). Ce robot suit un Surena-1 très primitif
qui a eu seulement 8 DOF. Surena-2 a assuré 10.000 heures-homme d'effort
d'accomplir.
(lien d'article) (lien d'article)
(lien d'article) (lien d'article)
 Surena II
Surena II
|
|
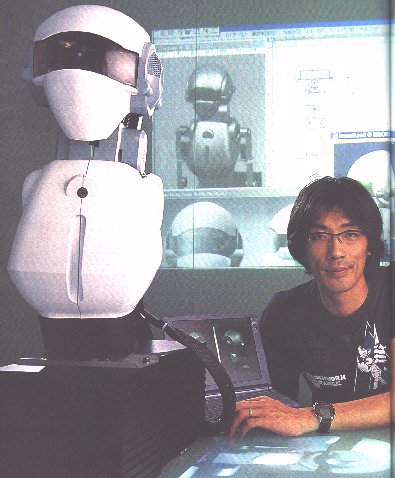
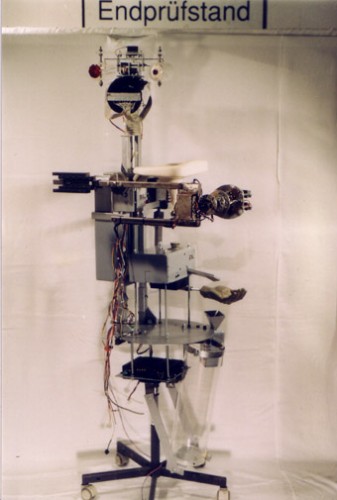
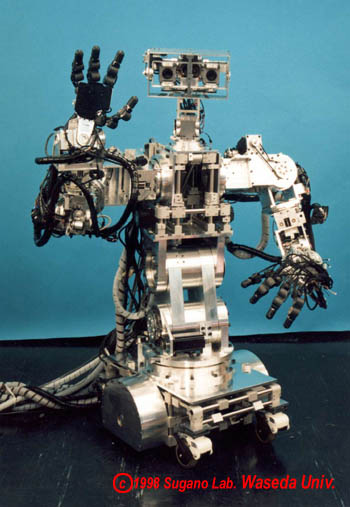
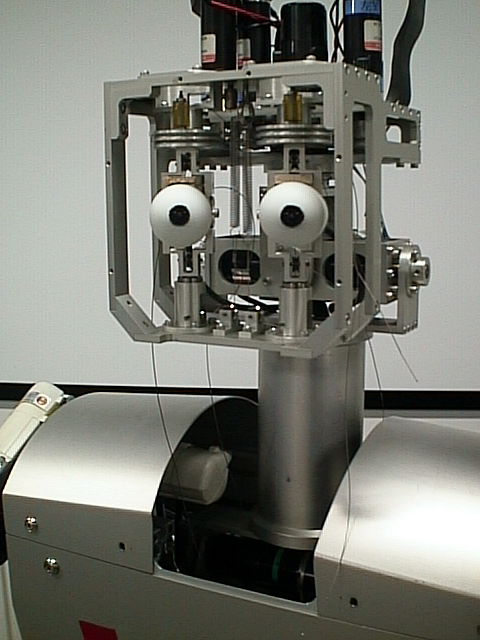
| 49. Hiroaki Kitano des systèmes symbiotiques de Kitano (Tokyo, Japon) qui est une filiale du Japon la Science et de
Technology Corp (voient l'entrée du côté gauche - # 11) qui
alternativement est placé par le gouvernement japonais construit un
androïde qu'il appelle SIG (groupe symbiotique
d'intelligence). La photo au-dessous des expositions SIG
et Tatsuya Matsui. Kitano a défié le monde des
constructeurs androïdes. Il croit que son androïde
sera l'archétype. Nous verrons à ce sujet.
D'ailleurs, ils recherchent des personnes pour joindre leur projet.  
Matsui-San et SIG
|
50. Hiroaki Kitano des systèmes symbiotiques de Kitano (Tokyo, Japon) qui est une filiale du Japon la Science et de
Technology Corp qui alternativement est placée par le gouvernement
japonais construit un bébé androïde appelé Pino. Pino a 29
moteurs et tient environ 75 centimètres (30") de grand et pèse 8
kilogrammes. Voici un lien à un article
de magazine de temps.
Un
nouveau lien de Pino que
j'ai récemment trouvé. DÉFAUT DE LA REPRODUCTION SONORE ! Kitano
donne maintenant les conceptions parties de logiciel et de matériel
qui ont été employées pour Pino. Allez juste ICI et engagez.
 Pino - 8KB
Pino - 8KB
Lien de conception de SIG
Lien de conception de
PINO. |
| 51. Kitano a maintenant un autre petit
Morph3 appelé androïde. C'est de 38 centimètres de grand (environ
15 pouces), a 30 DOF et pèse environ 2.4 kilogramme = 5.3 livres.
Il emploie également des communications de Bluetooth.
 
Morph3
|
52. E'octobre de 2001, les systèmes symbiotiques de Kitano ont annoncé un autre projet appelé "Morph". Morph emploie le protocole
de transmission sans fil de Bluetooth
pour passer des commandes à l'androïde et pour envoyer la
rétroaction de l'androïde de nouveau à l'ordinateur principal. Voici un autre article.
Murata est un codéveloppeur dans ce projet. Morph a 26 DOF et
tient environ 13.6"(35cm) grand. Ma meilleure source, Gianluca
m'a envoyé quelques liens avec des images.  
|
|
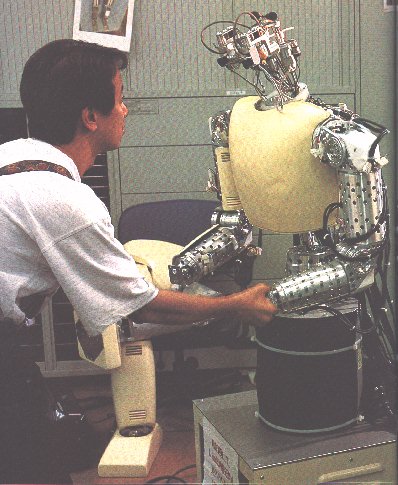
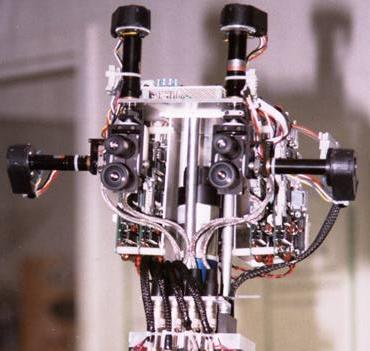
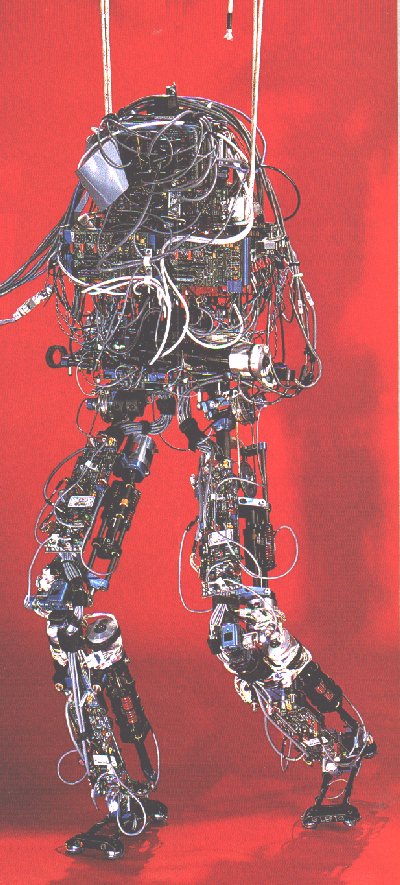
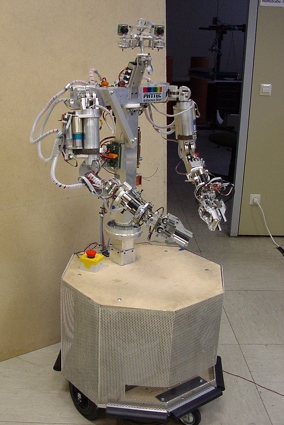
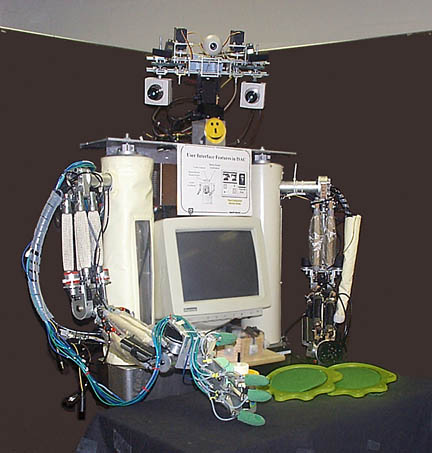
53. Le laboratoire électrotechnique
dans Tsukuba, Japon établit un humanoid au laboratoire d'interaction de Humanoid
sous la direction de professeur Yasuo Kuniyoshi. Leur humanoid s'appelle Jack,
leur androïde a coûté la manière plus de $1.000.000 - et son distillateur non
fini encore. Jack a été également décrit en article
de câble du magazine de ce mois concernant des androïdes. (septembre 2000,
pgs 252 - 272). Les jambes sont à peine évidentes simplement dans le
fond. Gordon Cheng m'a juste envoyé une autre image d'"Jack" et
un lien à un article gentil. Jack a 46 DOF.  
|
54. L'université de Tohoku a maintenant un autre
projet appelé l'"Saika3". Cet androïde semble l'alot comme les
androïdes de Honda. C'est 1.27m grand et 5 m de large et pèse
47Kg. Saika3
a 30 DOF 
Groupe Saika-3
|
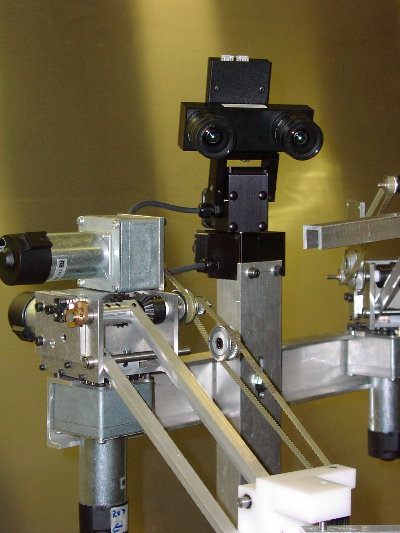
55. Le laboratoire
de système Kougaku de Jouhou à
l'université de Tokyo a un nouveau projet
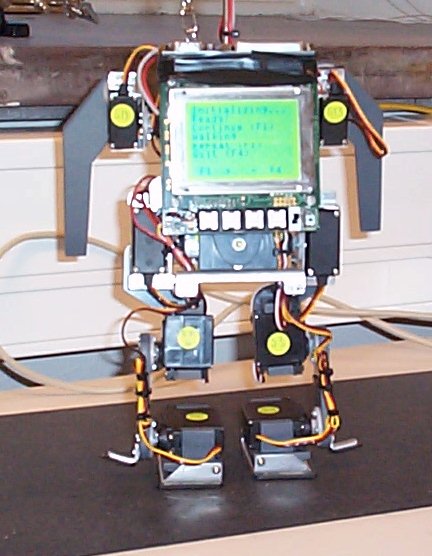
appelé H7. Son un autre bipède
semblable à H6. Un autre lien H7. (< = nouveau lien)


H7 est clairement très semblable dans la taille et les
possibilités à H6. Elles ont une vidéo 18Meg de H7 marchant
à l'aéroport d'industries de Kawada où les photos ci-dessus ont
été prises. |
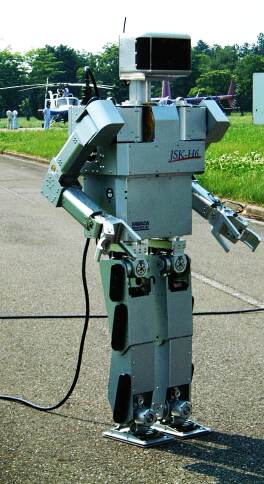
56. Le laboratoire de système
Kougaku de Jouhou à l'université de Tokyo
a un projet appelé H6. Son semblable à H5.  
H6 est de 1.37 m (4'6") de grand, au sujet du 59 m (23")
au loin, et pèse 55 kilogrammes (121 livres). Il a 35 DOF.
Note : Saika et H5 ont été déplacés à la page androïde historique de projets. |
| |
|
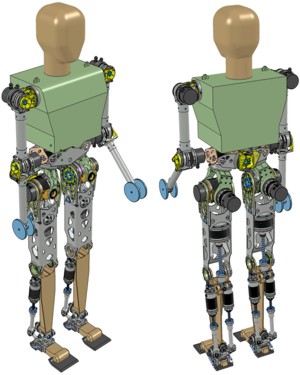
| 57. Il y a maintenant un deuxième projet principal
à l'université technique de Munich (TUM) - LOLA appelé. Ce humanoid aura 22 DOF
activement conduit les jambes avoir 7 DoFs chacun, alors
que le corps supérieur a deux et chaque bras a quatre.
 LOLA
LOLA
|
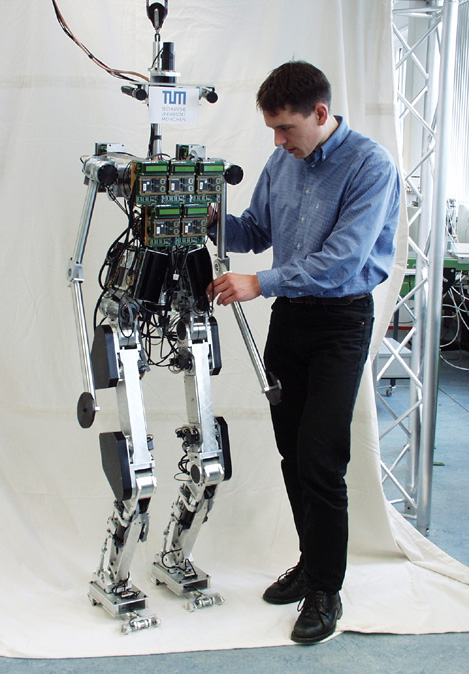
58. Il y a un grand projet androïde
s'attaquant dessus à l'institut pour la mécanique appliquée à
l'université technique de Munich (TUM).
Leur androïde s'appelle
"Johnnie" et il peut déjà marcher. Ils
essayent maintenant de le faire FONCTIONNER. Ceci signifie qu'il
y a deux projets principaux à Munich. Johnnie était sur
l'affichage à Hanovre juste ce printemps. Ils ont deux videos
sur leur emplacement. 
|
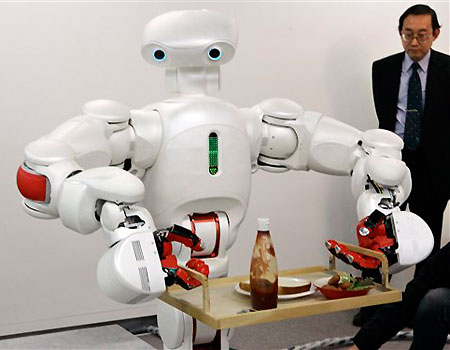
| 59. Voici un autre projet appelé
TwendyOne du
laboratoire de Sugano
à l'université de
Waseda à Tokyo. La grande avance dans ce humanoid est ses mains
très sophistiquées avec les doigts qui ont les sondes tactiles. Le
humanoid a 47 DOF et tient 1.47 m de grand et pèse 111 kilogrammes.
Ils ont deux ou trois
films ici.
 > >
Twendy One> |
|
| 60.
J'ai reçu un email de Dr. Davut Akdas. Il a construit le premier humanoid en
Turquie à l'université de Balikesir en Turquie du nord-est.
Son humanoid s'appelle RoboTurk. Il a un total de 23 DOF comprenant 12 DOF dans les jambes, 5
DOF dans le corps et 2 DOF dans les bras. Le poids est de 55 kilogrammes et la
taille est 150 cm. Son humanoid peut marcher en avant, à reculons, et en
longueur. Il peut même monter de petites étapes. Wouah ! Le grand travail !


|
61. Le prof. Gordon Wyeth et plusieurs
de ses étudiants ont lancé un projet appelé GuRoo (pour excessivement
Underfunded Roo) à l'université du
Queensland, à Brisbane, Australie. GuRoo aura 23 degrés de liberté
et tiendra 1.2 m de grand. Son poids projeté
est 30kg. Guroo a participé au Robocup récent 2002 au Japon. L'équipe a 6 personnes. Un
des membres d'équipe, Damien Kee, a signalé quelques videos de leur androïde prenant ses
premières mesures expérimentales. Ordonné
!

|
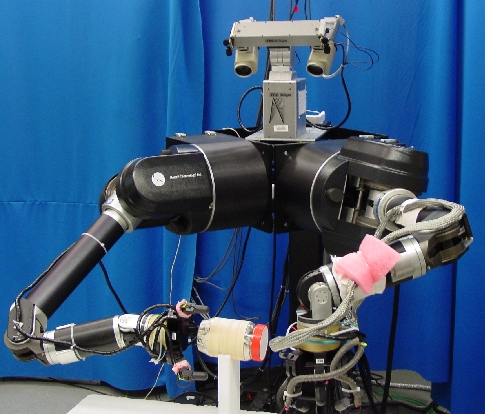
| 62. Le Japon la Science et Technology Corp
(Kyoto, Japon) a
récemment indiqué un projet de 5 ans pour construire un robot de
humanoid. Ce projet a commencé en octobre de 1996. Le
chef de projet est Dr. Mitsuo Kawato et ils ont un personnel environ
de 18. Leur robot de humanoid s'appelle DB
(voir ci-dessous).
 Image 32KB
Image 32KB
|
63. L'université technique de Darmstadt
a un projet de humanoid en cours maintenant. Leur humanoid s'appelle Lara.
C'est de 130 centimètres de grand et a 18 DOF qui se composent de 38 muscles de
fil de Nitinol. Le chef d'équipe est von Stryk de professeur Oskar et ils ont
environ 15 étudiants travailler sur le projet.
 Lara
Lara
|
| 64. Le projet d'ombre (Londres, Angleterre) ce groupe développe une machine de marche bipedal de humanoid. Elles ont également plusieurs produits à
vendre. Leur personnel inclut environ 14 personnes. Au-dessous de est une
image de leur marcheur bipedal.
 208K
208K |
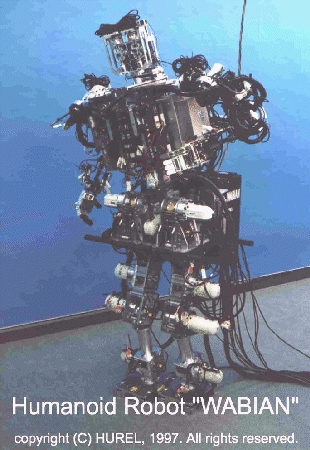
65. Le projet de Humanoid
d'université de Waseda
(Tokyo, Japon) leur androïde est d'environ 6 pieds de grand et pèse
plus de 600 livres. Il peut
marcher, mais juste à peine. Cet androïde et androïde de Honda ont été
décrits sur le programme de PBS appelé les "robots se levant" qui ont
aéré trois fois en mars, 1998. Le projet de Waseda Humanoid se compose
de six groupes :
Au-dessous de sont les images de Hadalay-2 et de Wabian.


|
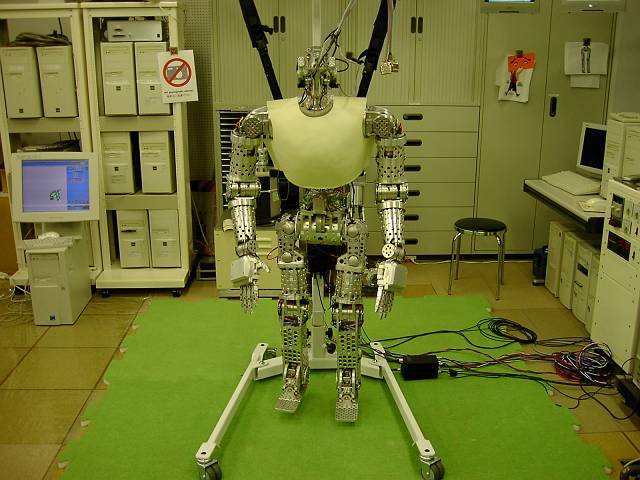
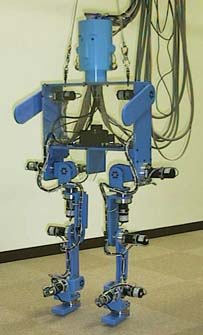
| 66. L'institut national de la Science et de la
technologie industrielles avançées à Tokyo (AIST) soutient 15
instituts de recherche de recherche dans l'ensemble du Japon
comprenant les 8 dans le nord de ville de la Science de Tsukuba de
Tokyo. Ils commanditent un projet de
humanoid qui a été commencé en 1998. Ils
ont réellement un grand nombre de
projets. 

Au-dessus de nous voyons que un P3 et du côté droit
est les jambes de HRP apprenant à marcher.
|
67. L'université de Chalmers a également un projet androïde complet appelé Priscilla qui a été
commencé en été de 2000. Elle est basée sur un plein
squelette classé d'un humain. Elle sera actionnée par les
cylindres hydrauliques. Vous pouvez voir qu'elle a la
vision binoculaire.  Priscilla.
Priscilla.
|
| 68. L'université de Tokyo
a un grand projet appelé Telesar2.
Elle se compose de deux systèmes principaux : 1. Le corps supérieur anthropomorphe avec les
bras et la tête a monté sur une tour tournante. et 2)
un système de commande qui a plusieurs moniteurs et deux commandes de
main que l'opérateur humain porte sur ses mains. Ceci
semble tout à fait unique. Les mains semble être
qualité très haute. Le projet est fil par Dr. Tadakuma
du laboratoire de Tachi de l'école graduée de la Science et de la
technologie de l'information chez l'Univ de Tokyo. Elles ont un bon nombre de videos sur leur emplacement. Elles ont exhibé leurs systèmes à l'EXPO
2005 du monde dans AICHI, Japon à partir juin de 9 juin à 19, 2005
 Telesar 2.
Telesar 2.


|
69. Le laboratoire de
commande de machine à KAIST chez Teajon, Corée a
un autre projet de humanoid appelé le robot de
KAIST Humanoid (KHR-1). Ce projet a commencé
en janvier de 2002 et inclut maintenant prof.
Juin-Ho OH et 12 étudiants. Le KHR-1 tient
1.2 m de grand et pèse 48 kilogrammes. Il a 21 DOF et
peut marcher. Il y a des videos sur leur emplacement.


|
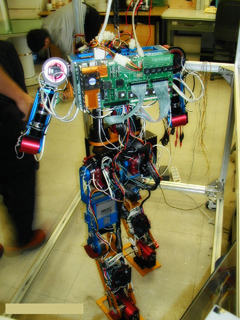
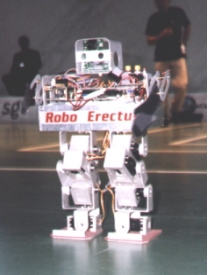
| 70. L'ARICC (robotique avançée et centre de
commande intelligent) dans l'école de la technologie électrique et
électronique, école d'enseignement technique de Singapour a un projet important de humanoid aller dans ce qu'elles sont le football de bâtiment jouant
des humanoids. Ils ont établi plusieurs humanoids, le plus en
retard de ce qui s'appelle Robo-Erectus III. Il tient 50
centimètres de grand et a 22 DOF. Le projet inclut environ 15 membres et est fil par
prof. Changjiu Zhou. 

|
71. L'université impériale Londres ont deux projets de humanoid. Ils ont une moitié supérieure d'un humanoid semblable à
la DENT - Ludwig appelé. Ils ont également deux petits humanoids
appelés chiquenaude et l'effondrement qui tiennent environ 14"grand. Ils ont des films de Ludwig. Les constructeurs
primaires sont : Murray Shanahan, Yiannis Demiris, Dave Randell,
et marque Witkowski.


Ludwig
Flip & Flop |
| 72. L'université de Tohoku a également un projet de marche bipedal de robot. Ce projet est sous la
direction de prof. Takashi Emura au laboratoire d'Emura. Ils ont 4 professeurs et environ 20 étudiants.
Leur but est d'établir un humain-type robot autonome. Ils avaient travaillé sur le projet pendant au moins
une année. Au-dessous de est une image de leur marcheur bipedal
- Monroe appelé après Marilyn Monroe.  Image 17KB
Image 17KB
|
73. Politecnico di Torino a un projet important de humanoid. Ce
s'appelle Isaac. Le chef est
prof. Guiseppe Menga et 7 étudiants travaillent également sur le
projet. Isaac est d'environ 61 centimètres (24 pouces)
de grand et pèse environ 7 kilogrammes (15 livres) qu'il a 16 DOF et
il est conduit par un PC104. Leur humanoid a gagné le 2ème
endroit dans le Robocup 2003.
 Isaac et équipe.
Isaac et équipe. |
| 74. Un androïde chinois a été annoncé
décembre 1, 2000. Cet androïde est de 1.4
mètre (55 pouces) de grand et pèse 20kg (44 livres). Il a
été construit à l'université de la Science et de technologie de la
Chine pour la défense nationale à Tchang-cha, Hunan, Chine.
Aparently elles ont établi un autre dos d'androïde en 1990.
Ils disent que l'"pionnier" peut marcher et parler dans
plusieurs langues. Voyez au-dessus de l'article pour des
détails.  Pionnier (14KB)
Pionnier (14KB) |
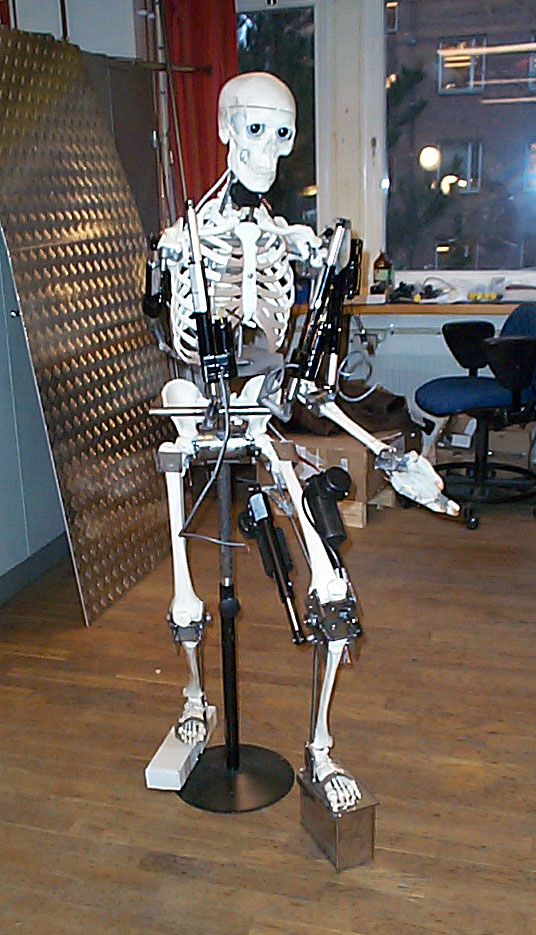
75. L'université de Chalmers
dans Goteburg, Suède a 3 projets maintenant.
Ils ont le projet d'Elvis qui fonctionne maintenant avec leur deuxième prototype, et
nouveau petit Elvina appelé androïde de marche. Leur personnel est environ 13. 

Elvis #2
Elvina |
| 76. Massachusetts.Institute.of.Technology - le projet Cambridge
, la masse,
Etats-Unis de DENT ce projet développe un
humanoid aussi. Leur humanoid a une tête avec quatre
yeux (deux pour la fin haute et deux pour la distance), deux bras et
un torse, mais il n'a aucune jambe encore. Elle a deux professeurs et environ 7 étudiants. Elle réclame également environ 10 anciennes élèves.
Les chefs de projet sont des ruisseaux et Lynn Stein de Rodney.
Une partie du meilleur pix de la DENT est sur le Home Page de ruisseaux de Rodney.
Au-dessous de sont les images de la DENT et d'un plan rapproché
de sa tête (avec 4 yeux). 

|
76b. Le laboratoire de
jambe de MIT a établi un ensemble de jambes qui
est prévu pour être marié au torse de DENT bientôt.
Les jambes, appelées le projet de m2, sont décrites en article
de câble du magazine de ce mois concernant des androïdes. (septembre
2000, pgs 252 - 272).  111KB
111KB |
| 77. Le MIT a un nouveau projet appelé Coco. On le cense être
gorille un petit ou peut-être de bébé. Il a 15 DOF et pèse
environ 20 livres. Le coco est à angle droit
environ de 12"(30 centimètres). 
|
78. L'université nationale de Yokohama a un projet de marche bipedal
de robot aussi. Ce projet est sous la
direction de prof. Atsuo Kawamura au laboratoire de Kawamura.
Ils ont au moins 5 membres de
personnel. Leur but est d'établir un
humain-type robot autonome. Ils avaient travaillé sur
le projet pendant au moins une année. Au-dessous de est une
image de leur marcheur bipedal.
 Image 19KB
Image 19KB |
| 79. Le laboratoire de Fukuda à l'université de Nagoya a un projet appelé le système inspiré biologique de robot (BIRS). Leur robot semble être d'environ 1.5 m de
grand et a 20 DOF. Ils ont un personnel de quatre professeurs et d'environ 30 étudiants travaillant à lui.
|
80. L'université maritime de la
Corée de Pusan, Corée a un projet androïde
bipedal important en cours. Elle regarde tout à fait semblable
à certains des projets japonais tels que le projet d'université de
Tohoku (voir #20 ci-dessus). Voici le lien - dans coréen ou anglais.

|
| 81. Voici le premier androïde iranien. Ce s'appelle Firatelloid
(d'abord Humanoid intelligent iranien). Ils ont
quelques films à leur page multimédia. Les principaux
lotisseurs sont Mohamad Shayganfar et Benjamin Fonooni de l'université d'Azad d'Arak. (Arak, L'Iran).
 Firatelloid.
Firatelloid. |
82. Voici "le cavalier sans tête" de la compagnie de moto de Castrol de Pangbourne,
R-U. Le robot a été construit réellement par Stahle
Gmbh de Neuhaussen, Allemagne. 
Ce robot a deux bras et deux jambes et est monté sur la
moto.
|
| 83. Le
laboratoire de robotique de Humanoid dans Linz, Autriche a construit
un Barbot - un robot anthropomorphe qui achète la bière à la barre et LA
BOIT ! C'est le premier humanoid que j'ai vu ce qui mange ou
boit n'importe quoi. Ils prennent des suggestions sur la façon
dont convertir la bière en puissance de courir le robot. Il est 1.7m
grand et pèse et 30 kilogrammes. Barbot a 7 DOF et peut être réservé
pour votre partie ou événement.
 Barbot - Linz, Autriche
Barbot - Linz, Autriche
|
84. Les travaux amorphiques de
robot de Munich Allemagne a construit un squelette
humain mobile qu'ils appellent Skelli.
C'est la taille d'un adulte normal et a 34 DOF comprenant
16 dans son visage. Un costume avançé de télémétrie
permettra à un participant d'enseigner les comportements de machine.
A conçu pour refléter la vulgarisation avec l'humanité,
certaines des expressions que cette machine de humanoid se manifestera
sont crainte, la colère, la joie, la douleur, la surprise et
l'impatience.
 Skelli avec Chico MacMurtrie
Skelli avec Chico MacMurtrie
 Détail d'épaule de Skelli.
Détail d'épaule de Skelli.
|
| 85. Le projet de Humanoid
d'université de Waseda a un autre projet appelé
"Wendy". "Wendy" est semblable à Halady. Il a un total de
52 DOF. Prenez garde que leur texte est dans le blanc,
ainsi il n'imprimera pas dehors correctement - au moins sur une
imprimante couleur. Voici une image de Wendy.  L'image est 42K.
L'image est 42K.
|
86. Maintenant l'université de Waseda a un autre
projet appelé l'iSHA.
Ce humanoid a 26 DOF qui sont la plupart du temps conduits par
les moteurs électriques. Il peut fonctionner de façon autonome
pendant 2 heures. DÉFAUT DE LA REPRODUCTION SONORE !
Très impressionnant !
 iSHA.
iSHA.
|
| 87. Waseda a un autre projet (que j'ai finalement
trouvé) Robita appelé. Il est conçu pour conduire des conversions avec
des personnes. Elles ont plusieurs films à la page de Yosuke Matsusaka.
Ce projet a été en activité depuis juin 1999.
 Robita
Robita
|
88. L'université de Waseda a également un
projet appelé
Wamoeba. Son étant construit au laboratoire de Sugano. Il
semble qu'il y a eu 3 versions depuis 1995. L'image ci-dessous
est la plus tardive - Wamoeba appelé 2Ri.  Wamoeba - 2Ri
Wamoeba - 2Ri |
| 89. Un système de robot de Humanoid est développé
au centre intelligent de
recherche en matière de robotique
de l'institut de la Corée de la Science et de la technologie à Séoul,
Corée. Le but est de construire a humain-comme le robot autonome.
Le nom de ce projet est
CENTAURE
- après le moitié-cheval moitié-humain de la mythologie grecque - et il
a 4 jambes. Le personnel courant est 14. L'image ci-dessous est la pièce
de corps supérieure humaine. Ils ont également un projet de
coordination d'oeil de vision
ici.
(* liens fixes 09/11/03 *) 

|
90. Le laboratoire d'intelligence
et de médias d'Articifial de
l'institut de la Corée de la Science et de la technologie
ont maintenant deux projets sous le developement. Ils
ont le projet de BUT et le projet
d'AIMET. Ils sont développés sur le campus de Taejon dans Taejon, Corée. Ils ont quelques agrafes visuelles à regarder aussi.


VISEZ
AIMET (à gauche), BUT (centre) |
| 91. L'université de la Floride a un projet de humanoid à leur laboratoire d'intelligence de machine, Gainsville, la Floride. Leur humanoid
s'appelle Pneuman. Les
professeurs inclus sont : Antonio Arroyo, Michael
Nechyba, Eric Schwartz. Il y a également beaucoup d'étudiants travaillant sur le projet. Le humanoid est de 59 pouces de grand, pèse 102
livres et a 25 DOF. Voici un autre
article que j'ai trouvé.
 Pneuman.
Pneuman. |
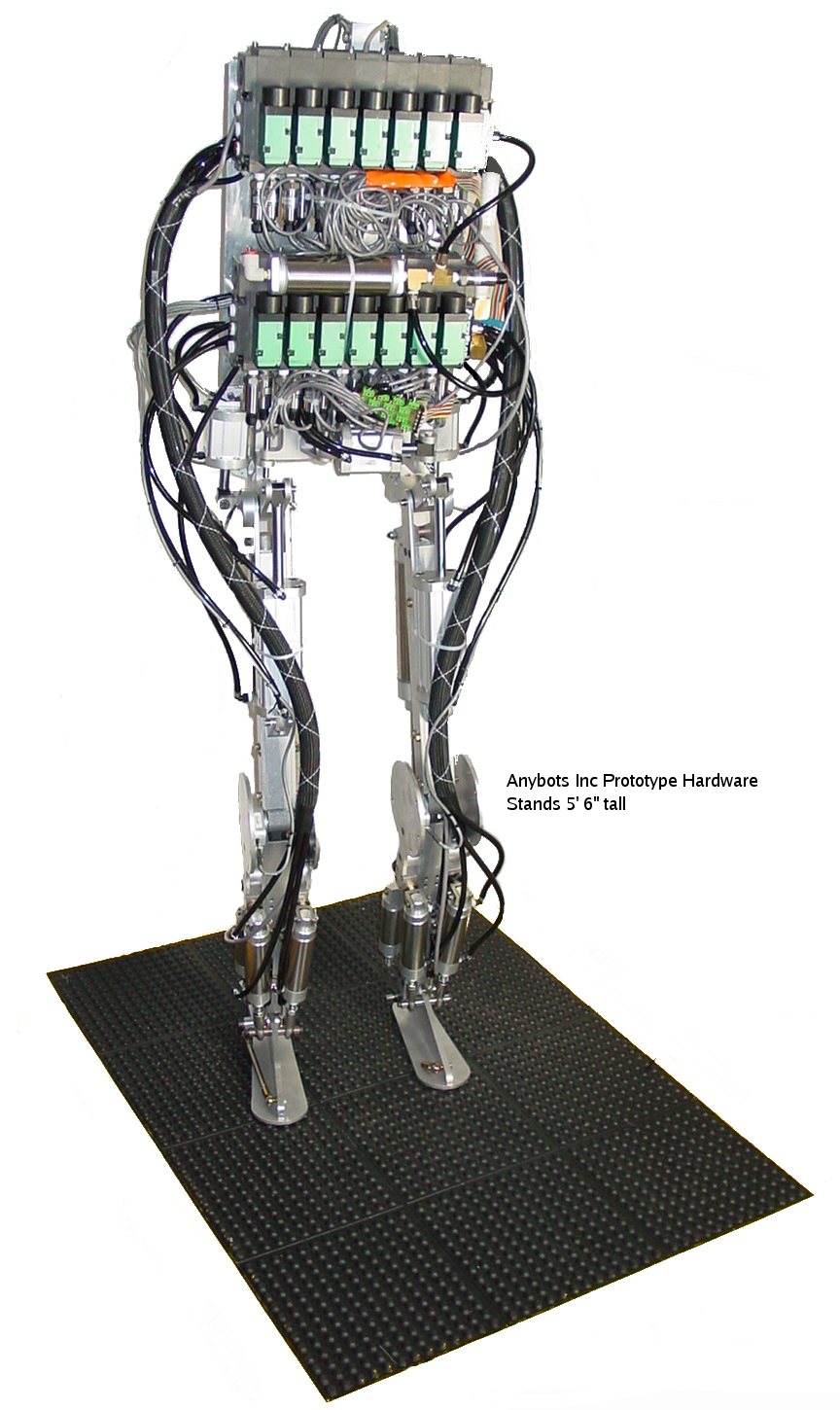
92. Anybots de Mountain View, la Californie a un projet complet de humanoid en cours. Il s'avère que chaque jambe a 7 DOF. Ils
ont une vidéo de leurs jambes équilibrant verticalement. Ils ont également des prototypes des mains.

|
| 93. L'université de Karlsruhe en Allemagne a
un grand projet appelé SFB 588, un robot de
humanoid. Leur robot n'a pas des
jambes encore mais il semble avoir les mains très capables avec
environ 15 DOF pour chaque main. Ainsi le nombre global
serait entre 40 et 50 DOF. 
 Mains de Nice.
Mains de Nice. |
94. L'institut de la Science de mesure à l'université de
Bundeswehr de Munich (Allemagne) a un grand projet appelé Hermes. Mes appologies à eux
pour ne pas les énumérer il y a bien longtemps. Ce projet
était allé depuis 1996. L'investigateur principal est Rainer
Bischoff et il y a 7 autres membres et
environ de 35 personnel et étudiants passés
de personnel qui ont travaillé sur le projet. Ils
ont accompli le bon progrès. 
|
| 95. L'université de Carnegie Mellon (CMU) et
l'université de Pittsburg ont lancé un projet important appelé le Nursebot, avec une
concession $1.4 millions à partir du National Science Foundation. Ceci semble être énorme parce qu'elles ont l'autant d'en tant que 50 personnes travaillant à de diverses parties de lui. Elles semblent avoir
deux prototypes : Perle et Florence. Ses environ 4 pieds
grands.  50 KBS
50 KBS
|
96. Tamim Asfour, un étudiant de diplômé à
l'université de Karlsruhe (Allemagne), fait partie d'un projet
important qui établit un humanoid appelé ARMAR. Nombre de personnel :
inconnu à moi. 
ARMAR - 124K
|
| 97. L'université du Massachusetts chez Amherst a
un projet de humanoid au laboratoire pour la
robotique perceptuelle. Prof. Roderic Grupen
est le directeur. Ils ont quatre
professeurs sur le projet et environ 20 étudiants. Ils ont établi la moitié supérieure d'un humanoid -
semblable au MIT et au Vanderbilt. Leur humanoid a environ 29
DOF, y compris 2 bras fonctionnels (7 DOF chacun) et
deux 3 mains digitées (4 DOF chacun).
 Humanoid d'UMass.
Humanoid d'UMass.
|
98. L'école d'université de Vanderbilt de la technologie
a un robot de humanoid appelé ISAC
en cours de développement. Ce projet a
quatre professeurs et 23 étudiants. Le projet a été en cours
pour le but courant d'environ 5 years.Their est de permettre à ISAC
d'apprendre de ses propres expériences et d'agir l'un sur l'autre
avec des personnes d'une manière normale. Finalement, ISAC sera
un donateur de soin de dans-maison pour le vieux ou infirme. Le directeur du centre pour les systèmes intelligents
est prof. Kawamura. Leur personnel inclut Profs. Peters,
Wilkes, Biswas, et Gaines.
 Image 46KB
Image 46KB
|
| 99. Le projet de ProtoAndroid (Austin, Texas) ce projet est financé par Faustex Systems Corporation, dont
fondateur et le président est David Santos. Ce projet a été
en cours de développement depuis au moins 1992. C'est 6'4" grand et pèse environ 300 livres.
La taille du personnel est environ 5. Ils ont également
construit le robot martial des arts H2
montré ci-dessous.
 116K.
116K. |
100. La Thaïlande a maintenant son premier projet
androïde. University du Roi Mongkut's de la
technologie chez Thonburi construit un androïde
aussi. 
|
| 101. Commencé en 1996, Aandroyds inc. offre une ligne de 2,
4, et 6 machines à jambes à vendre. Les machines sont conçues
pour la maison, le bureau, et l'industrie, avec les modèles faits sur
commande de laboratoire et d'espace disponibles. Trouvez-les à Aandroyds.com. |
102. Dr. Jennifer Best à UCLA mène un nouveau projet androïde de développement .
Leur lien principal d'enchaînement
peut ne pas fonctionner parce que leur serveur est
en panne. Vous pourriez essayer celui-ci. Avec une école
importante aimez UCLA soutenant ce projet, je suis sûr que nous
pouvons nous attendre à de grandes choses. |
| 103. L'université nationale de Kumoh de
la technologie à Séoul, Corée a un projet qui
construit un robot miniature de humanoid. Elle est construite
par le groupe de mechatronics qui fait partie du service de
construction mécanique. Ils réclament que leur robot de
humanoid peut marcher à travers des escaliers. DÉFAUT DE LA
REPRODUCTION SONORE ! Voici un couple des papiers que j'ai
trouvés. [ 1 ] Y. W. Sung, et S. Y. Yi, "un robot miniature
de humanoid qui peut marcher à travers des escaliers", Proc. du
colloque international sur Robotics'2001, Séoul, Corée, 2001
[ 2 ] Y. W. Sung, et S. Y. Yi, "le développement
d'un système miniature de robot de Humanoid", Proc. du colloque
international sur la robotique et l'automation 2000, Monterrey,
Mexique, pp.133~138, 2000
|
104. L'université de Tsinghua
dans Pékin, Chine a un robot bipedal THBIP-I
appelé par projet de humanoid. Ce projet a plusieurs
ans. Voici un article de
nouvelles. Voici quelques papiers que
j'ai trouvés : [ 1 ] "Humanoid Li de robot Le THBIP-I Bipède" Liu,
Jinsong Wang, Ken Chen, Jiandong Zhao et Dongchao Yang (université de
Tsinghua, Chine)
[ 2 ] "planification de démarche de robot de Humanoid
basée sur Anticipant ZMP Tranck" Dongchao Yang, Li Liu, Jinsong Wang,
Ken Chen (université de Tsinghua, Chine)
[ 3 ] "une nouvelle méthode de génération de
démarche pour un robot de marche Bipède" Kai Xu, Ken Chen,
Jinsong Wang, Li Liu, Dongchao Yang, Jiandong Zhao
Institut de la technologie de fabrication, université
de Tsinghua, Chine |
| 105. La terre intelligente, une
compagnie située dans Kirkcaldy, Ecosse, a
annoncé un nouveau projet pour construire un androïde de marche et
parlant complètement classé. L'annonce est apparue à la fin de cet article de nouvelles de la
BBC.
 Doki Doki
|
106. L'université de Freiburg dans Freiburg, Allemagne a
lancé un projet d'étude de robots de Humanoid en janvier de
2004. Le projet, appelé Nimbro, est
dirigé par Sven Behnke et fera participer environ 12 personnes. Elles établiront un humanoid qui sera d'environ 150
centimètres de grand (5 pieds) et pèsera environ 38 kilogrammes. Il aura 22 DOF. Ils voudraient
concurrencer dans le tournoi du football de Robocup Humanoid.
|