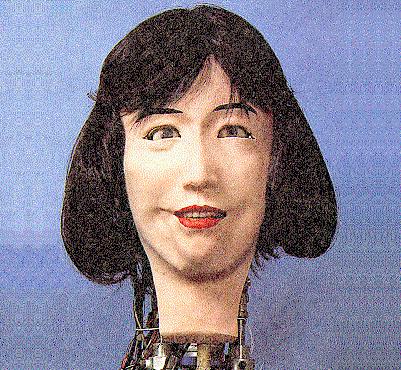
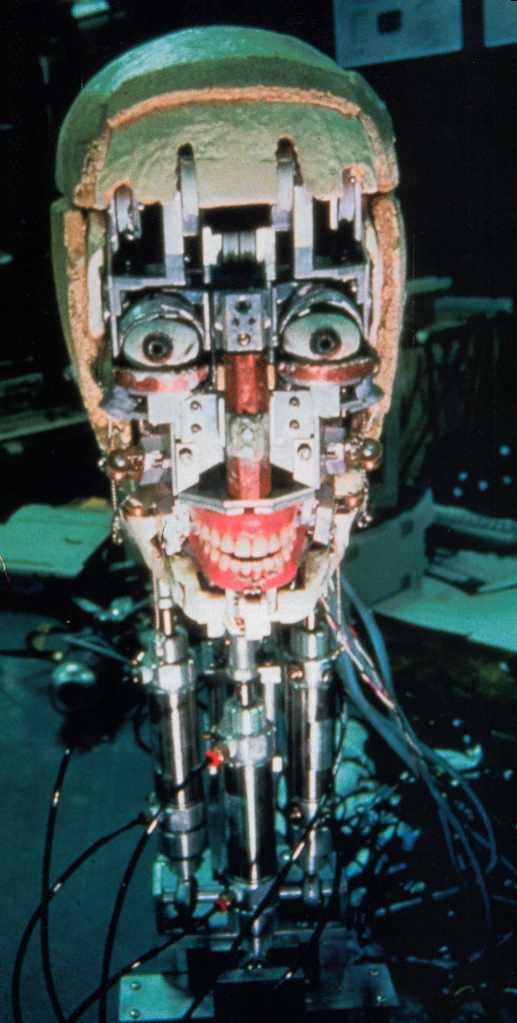
| 1. Fumio
Hara of the Science University of Tokyo has built a robotic head of a Japanese woman
which is controlled by 24 hydraulic cylinders which can change its facial expression to
one of six common human expressions. Black Ice has a very good article about
"Roberta".  
55KB
46KB.
2. A small French company called Techno Concept
is now offering an android hand. You may contact Gilles Lopez for information about it.
The hands are custom made with 3, 4, or 5 fingers. You also have
a choice of materials. The cost is about 2500 Euros.

3. The Janus Project (Germany)
The goal of the project is to build an anthropomorphic two-armed robot combined with a
multi-camera vision system. This project is similar to the MIT COG project.
They have 4 core members
and a variable number of guest researchers.
4. Another project at Waseda Univ in Tokyo is the MIA Arm-Hand Project.
The Mechanical Impedance Adjuster project is developing a 7 DOF arm with a 13 DOF dextrous
hand. You can see some of their other projects here.
 35K MIA arm.
35K MIA arm.
5. The Univ of Tokyo has another project called Telesar which has a 3
DOF head with binocular eyes and a 7 DOF right arm.
 35K image.
35K image.
6. Ruhr Univ in Bochum,
Germany has a head - arm project similar to the Univ of Tokyo project listed above. It
has a 3 DOF head with binocular eyes and a 7 DOF arm. Sorry, no pix.
7. NASA has a small project at the Johnson Space Center called DART for Dexterous
Anthropomorphic Robotic Testbed. It has a head with two eyes and two rather clumsy arms
with three fingered hands.
 16K image (beware their image is 430K)
16K image (beware their image is 430K)
8. Shadow Robot Project:
Biomorphic Arm (London, England) This project is part of the Shadow Robot project in
London. They have developed some "air muscles" which they offer for sale.
9. Anthroform Arm
Project (University of Washington) This group is developing a mechanical replica of
the human arm for the purpose of studying biomechanical and low-level neural properties of
the arm and spinal-reflexive postural control. Staff is 3 plus guests.
10. The Anthropomorphic
Arm Project - University of Stradclyde, UK. They are building an anthropomorphic
arm. It is similar in size to the real thing.
11. ARTS: Anthropomorphic
Robot Hand (Technische Universitat, Berlin, Germany) This project is building a robot
hand.
12. The Utah/MIT
Dexterous Hand (UMDH) (Univ. of Utah & MIT) This group is building a 16 degree of
freedom anthropomorphic dexterous hand. Each of the fingers (3) and the thumb have 4
degrees of freedom.
13. The The Yale hand
is being built at Yale University. This group is building a 6 degree of freedom
anthropomorphic dexterous hand. Each of the fingers (3) have 2 degrees of
freedom.
14. Humanoid Hand Project (Vanderbilt University, USA) The group at the IRL is
also working on a humanoid hand.
15. The NEUROS
Project (Germany) The goal is to develop an autonomous robot system with basic
navigation and handling skills for a non-restricted environment, i.e. the methods should
be applicable in a private household as well as in a production plant.
 Their prototype is called Arnold (23K).
Their prototype is called Arnold (23K). |