Wabot-1 was the first full-scale anthropomorphic robot built in the world. It consisted
of a limb control system, a vision system, and a conversation system. The Wabot-1 was able
to communicate with a person in Japanese and to measure distances and directions to the
objects using external receptors, artificial ears and eyes, and an artificial mouth. The
Wabot-1 walked with his lower limbs and was able to grip and transport objects with hands
that used tactile sensors.

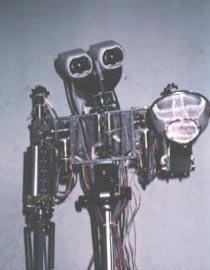
1983-1988 - Greenman (USA)
An anthropomorphic manipulator was developed at NRad in the middle 1980s and was
nick-named Greenman. NRad has changed its name to Space and Naval Warfare Systems
Center, San Diego or SPAWAR.
They have many robotics projects which you can see
here.


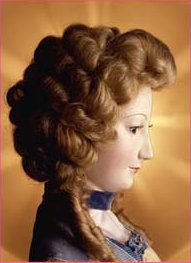
Greenman
Close-up of head
SPAWAR also developed 3 robots for the US Navy called Robart I, Robart II,
and Robart III. Robart
I was built during 1980-1982. Robart II was built
during 1982-1992. Robart
III started in 1992 and is still ongoing.
The robot musician Wabot-2 is able to communicate with a person, read a normal musical
score with his eyes and play tunes of average difficulty on an electronic organ. The
Wabot-2 is also able to accompany a person while he listens to the person singing. The
Wabot-2 was the first milestone in developing a "personal robot".
 Image is 20K
Image is 20K
1985 - WHL-11 (Waseda Hitachi Leg 11) (Japan)
The WHL-11 biped walking robot was developed by Hitachi Ltd based on the WL-10R with a
computer and hydraulic pump installed. The WHL-11 is capable of static walking on a flat
surface at 13 seconds per step and it can also turn.

The WASUBOT was another musician robot. It performed a concerto with the NHK Symphony
Orchestra, playing "Aria on the G-string" by J.S. Bach at the opening ceremony
of the International Science and Technology Exposition which was held from March 16 to
September 16, 1985.

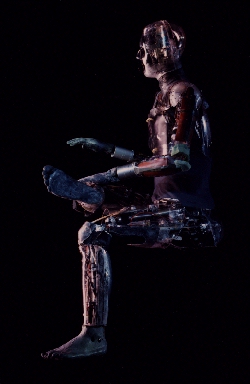
1986-1989 - Manny (USA)
Manny was a full scale anthropomorphic manikin developed at Battelle's Pacific
Northwest Laboratories in Richand, Washington. It took 12 researchers 3 years and $2
million to develop this robot. Manny has 42 degrees of freedom and was delivered to the US
Army's Dugway Proving Ground in Utah in 1989.
Here are a couple of pictures of Manny


Image is 73K
Image is 52K
1986 - 1993 Honda Motor Company (Tokyo, Japan).
Honda began developing their androids in 1987 which marked the beginning of a ten year
effort. During the first seven years they developed 7 walkers which were designated E0
through E6. E0 was in 1986, E1 - E3 were done during 1987 - 1991. And E4 - E6 were
done between 1991 - 1993. Here is a link to E0 - E6.
Here is a new history link from Honda.
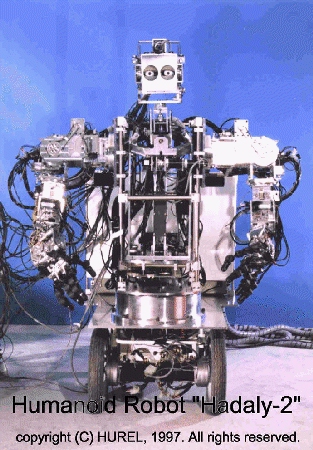
An anthropomorphic robot called "Hadaly" was developed in 1995, to study
human-robot communication. Hadaly has three subsystems: a head-eye subsystem, a voice
control system for listening and speaking, and a motion control subsystem. The head-eye
subsystem makes it possible to turn toward the visitor. The voice subsystem converses with
the visitor in Japanese and the motion control subsystem moves the arms to point toward
campus destinations. The name Hadaly is from the manmade human in the novel "L'eve
Future" by French author Villiers de I'Isle-Adam which was written in the 19th
century. Hadaly was not very anthropomorphic.
 Image is 152K.
Image is 152K.
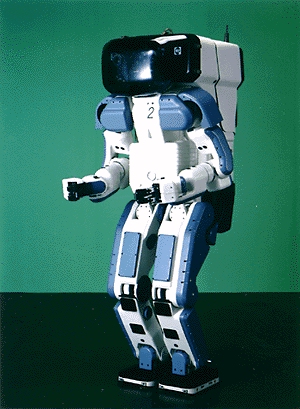
1996 - Honda Motor Company ( Tokyo, Japan )
Honda introduced their "Human" robot in Tokyo on December 20, 1996. It stands
6 feet tall and weighs about 460 pounds. In can operate completely independently on
battery power for 15 minutes. This is truly a great achievement. Since then Honda has
introduced the P2, P3, and ASIMO androids. You can see them all on the World's Greatest Android Projects page. Here is a new history link from Honda.
 Image is 105K
Image is 105K
A light-weight, human-size and low-cost humanoid robot was developed. The humanoid
robot is named Saika ("outstanding intelligence" in Japanese). Saika has a
two-DOF neck, dual five-DOF upper arms, a torso and a head. Several types of hands and
forearms are under development also.The Jouhou System Kougaku laboratory
directs this project. They have several professors and about 50 students. This
project was active between 1996 - 1998


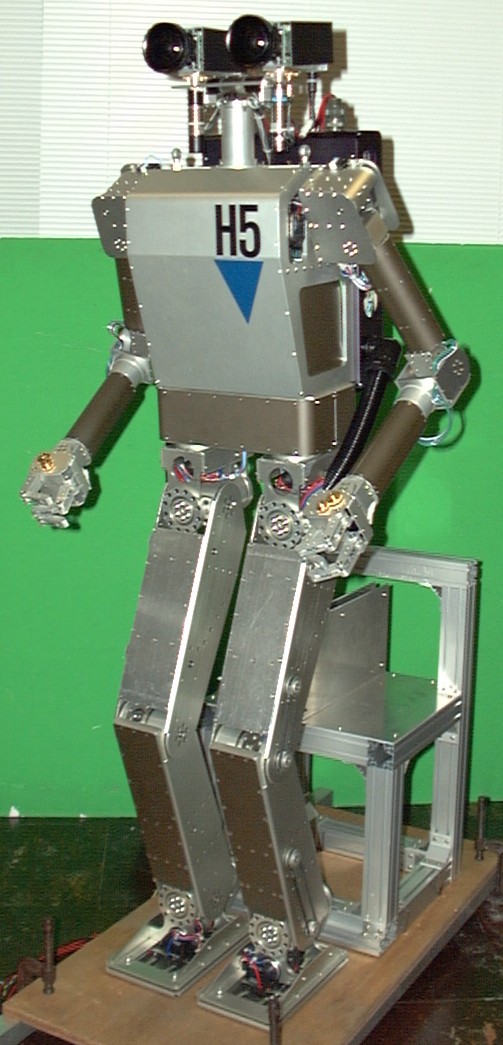
Jouhou System Kougaku (JSK) laboratory at Tokyo University has another project called H5. This android is full-sized
with legs. This project began at the end of 1998.
 H5 - 125 KB
H5 - 125 KB
The original P1.
Honda built a battery powered android
which can walk like a person and can even walk up and down stairs. It looks like an
astronaut in a spacesuit. It stands about six feet tall and it weighs about 460 pounds.
Honda spent 10 years developing this android which was introduced in Tokyo, December 20,
1996. Honda has now revealed that they spent more than $100 MILLION (US) on that
project.. This android is referred to internally as P2. Staff: unknown, project
estimated to be at least 200 man years. Here is a link to
P1 -P3.
Karsten Burns at the University of Karlsruhe has researched all the walking machines in
the world and has produced a walking
machines catalog.