|
1. Das nationale Institut der vorgerückten industriellen Wissenschaft
und der Technologie (AIST) von Japan in Verbindung mit Kawada
Industrien hat jetzt den
HRP-4C Humanoid
freigegeben. Dieser Humanoid steht 1.58 Meter hoch (62") und wiegt
43 Kilogramm = 95 Pfund. Es kann langsam gehen und aussehen wie eine
junge Dame. Sie hat 30 DOF und wird für ungefähr 20 Million Yen oder
$200.000 verkaufen.
Einige Videos sind hier.

 |
2. Kokoro und Osaka-Universität haben ein neues lebensechtes androides benanntes
Actroid DER3 (Nachfolger zu DER2) entwickelt. Diese Androids schaut sehr
Menschen und Gespräch und verschiebt ihre Köpfe, Arme, Hände und Körper.
DER2 (Artikelverbindung) (Aufstellungsortverbindung) (youtube
Verbindung)
DER3
(Artikelverbindung) (Aufstellungsortverbindung) (youtube Verbindung)


|
|
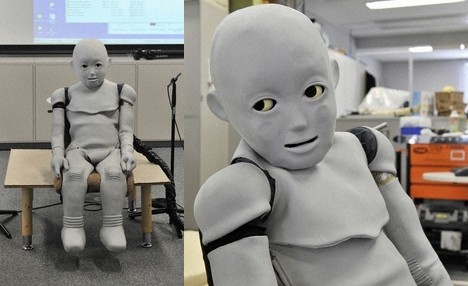
3.
Das JST ERATO Asada Projekt und die
Osaka-Universität haben
ein Kind-sortiertes androides benanntes CB2 errichtet (Kindroboter mit
biometrischem Körper). Er ist 130 cm. hoch, wiegt 33 Kilogramm. und hat 56 DOF.
Er hat Kameras für Augen und Mikrophone für Ohren. Er hat auch 197 Tast-Sensoren
eingebettet in der Silikonhaut.
Androide Seite.
Verbindung 1;
Verbindung 2;
Verbindung 3;
Video 1;
Video 2;
Video 3;


|
4. Das Robotercub-Konsortium (11
europäische Organisationen) haben sehr hoch entwickeltes Kind sortierten
Humanoid angerufenen Robot Cub errichtet. Dieser Humanoid hat 53 DOF, steht 104
cm hoch und wiegt 22 Kilogramm. Mehr als 40 Leute bei 11 Anstalten über Europa
haben diesen Humanoid entwickelt. Es gibt zwei Videos
hier und
hier.


|
|
5. KITECH (koreanisches Institut der industriellen Technologie) hat einen
anderen Android eingeführt, der EveR-3 genannt wird. Sie ist 1.57 m hoch (5' 2")
und wiegt 135 Pfund (60 Kilogramm) und ist zu 16 Gesichtsausdrücken fähig. Sie
hat 35 DOF in ihrem oberen Körper.
(Artikelverbindung) (Artikelverbindung) (youtube
Verbindung) (youtube Verbindung)


EveR-3 |
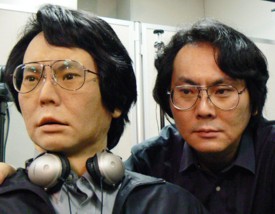
6a. Prof Hiroshi Ishiguro der Osaka Universität hat einen doppelganger
Roboter gehabt, der von gebildet wird. Ishiguro ist der gleiche Professor, der
die Mannschaft führt, die das actroid (sehen Sie unten) und actroid DER und das
actroid DER2 errichtete (oben gezeigt). Dieser Android hat 46 Freiheitsgrade. Es
gibt einige videos, die hier vorhanden sind. Eine andere Nachricht ist hier.

6b. Doppelgangers erhalten populär. Ist hier ein von Zou Renti
(L), das am
China Roboterexpo 2006 gezeigt wurde, der vor kurzem in Beijing gehalten wurde.

|
| 7. Osaka University & Kokoro Inc. haben eine verbesserte
Version des Actroid humanoid produziert, das Repliee Q1 für die
angemessene Expo-Welt 2005
genannt wird, die jetzt an in Nagoya,Japan geht. Repliee Q1 hat die
Silikonhaut und -blicke, die sehr menschlich sind, während sie und
gentures zu Ihnen sitzt. Dieser Roboter hat 41 DOF (gegen 31
für Actroid).
 < = Repliee Q1
< = Repliee Q1
|
8. Eine andere koreanische Gruppe an KITECH hat
einen Android produziert, der sehr viel wie Repliee-Q1 ist. Es wird EveR-1 genannt. Es ist ungefähr
hohes 1.6m und wiegt ungefähr 50 Kilogramm. Die Mannschaft, vorangegangen von Baeg Moon-hong-hong,
ein älterer Forscher am Korea Institut der
industriellen Technologie, Donnerstag (5/4/06)
entfernten die Verpackungen weibliche android, genannt EveR-1,
während einer Ausstellung in der Seoul Ausbildung Kultur-Mitte.
Baeg, das gerade 3 Milliarde aufwendete (3.16M USD) wenn er
EveR-1 in einem Jahr verursachte, schaut, um seine japanischen Rivalen
zu übersteigen gewann, indem die vorbildliche Bewegung vier Glieder
spät bilden bis zum diesem Jahr.


EveR-1 KITECH
|
|
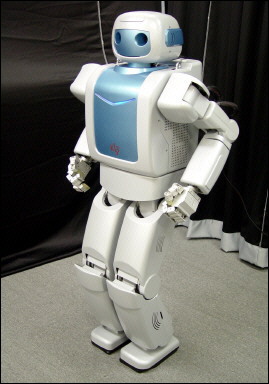
9. Neues Asimo humanoid
Honda hat ihr aktualisiertes Asimo humanoid
vorgestellt. Es ist 130 Zentimeter hoch, wiegt 54 Kilogramm = 119
zerstößt und hat 34 DOF. Ist
hier ein netter Bildschirm.

|
10. Ist hier Aiko, das ein
sehr anthropomorpher Humanoid durch Le Trung errichtete (Brampton,
AN, Kanada). Sie hat z.Z. 23 DOF, von denen 10 in ihren Fingern sind.
In der Zukunft hat sie 12 weiterer DOF. Sie ist 1.52 m hoch, aber
kann nicht Fastfood- durch noch. Trung hat einige
Videos hier.
Großer Job in nur einem Jahr!


Aiko
with Trung |
| 11. Kokoro Träume und Osaka Universität
verkündeten einen Sitting android Nov. 19, 2003 an der internationalen Roboter-Ausstellung 2003 in
Tokyo. Dieser Android wird Actroid genannt
und es ist SEHR realistisch. Actroid Spezifikation:
Das System besteht aus drei verschiedenen Maßeinheiten: Humanoid
Teil: Höhe = 1.3m;
Breite = 0.42m; sitzende Länge = 0.725m; Gewicht = 30 Kilogramm. Der Android hat 31 DOF. Er läßt an gezusammendrückte Luft und Elektrizität
laufen (120w). Steuereinheit:
Höhe = 0.6m; Breite = 0.75m; Länge = 0.6m; Gewicht = 40 Kilogramm; enthält
Hauptcomputer. Kompressormaßeinheit:
Höhe = 1.37m; Breite = 0.9m; Länge = 0.9m; Leistungsaufnahme = 3.7 Kilowatt;
Geräusche < DB 50.
|
Ist hier ein Film von Actroid. Ist hier ein anderer
Artikel über Actroid.


Actroid
mit Freunden. |
|
12. China hat singenden android angerufenen Dion vorgestellt. Während es
nicht fast so vorgerückt wie das Actroid ist, das oben gezeigt wird, ist es
sehr lebensecht. Es ist ein Leben-sortierter stehender Android mit einer sehr
womanly Form. Geschichte und Bildschirm sind hier.

|
13. Das Institut der Automatisierung der chinesischen Akademie von Wissenschaft
in Beijing stellte ein neues weibliches humanoid vor, das Rong Cheng an August
7, 2006 genannt wurde. Dieses humanoid ist 168 Zentimeter hoch und wiegt 60
Kilogramm. Der Primärentwerfer war Yue Hongqiang und seine Mannschaft dauerte
ein Jahr, um dieses humanoid an Kosten von $37.500 zu errichten (300.000 Yuan).
Rong Cheng wird zum Sichuan Wissenschaft Museum in Chengdu geschickt, in dem sie
eine Empfangsdame und ein Tourführer für das Museum ist.
Artikel
Artikel
Bildschirm (Quicktime)


|
| 14. KIST hat gerade das Mahru-Z Robotermädchen (2010) vorgestellt.
Es ist 130 cm. hoch, wiegt 55 Kilogramm und hat 3 Finger auf jeder Hand. Sie hat
35 DOF.
Verbindung 1;
Verbindung 2;
Verbindung 3;
Video 1;
Video 2;

 Z (right)
Z (right)
|
15. KIST führte das Mahru-R 2009 ein. Es ist 145 cm. hoch, wiegt
67 Kilogramm. und 35 DOF und hat 3 Finger auf jeder Hand und geht bei 2.6
Kilometern. /hr.
Verbindung 1;
Video 1;
Video 2;

|
|
16. KIST führte das Mahru-M 2008 ein. Es ist ungefähr 150 cm.
hoch, wiegt 62 Kilogramm. und rollt herum auf Rädern. Vermutlich ungefähr 20
DOF.
Verbindung 1;
M (left)

|
17. Choromet (HRP-2m) ist ein fantastischer Spielzeug Humanoid.
Es ist 35 cm. hoch, wiegt 1.5 Kilogramm. und hat 20 DOF. Seine Kosten betragen
ungefähr 500.000 Yen ($4.400). Choromet kann an sich sich hinlegen und Fastfood-.
Es kann auf einem Bein auch stehen. Es verwendet einen Betriebssystem Linux.
Choromet wurde von Japan fortgeschrittenem industrielle Wissenschafts-und
Technologie-Institut (AIST) und 4 Privatunternehmen von entwickelt.
Verbindung 1;
Video 1;

|
|
18. E-nuvo ist 126 cm. hoher Humanoid errichtet von der Bewohner-
von Nipponfachhochschule. Es wiegt 15 Kilogramm. und hat insgesamt 21 DOF. Es
verwendet Lithium-Ionenbatterieleistung.
Verbindung 1;
Video 1;

|
19. ATOM-7xp ist ein neuer Humanoid (Januar 2010) entwickelt von
Dan Mathias bei FutureBots in den letzten 8 Jahren. Es ist 158 cm. hoch, wiegt
73 Kilogramm. und hat 49 DOF (einschließlich 10 für den Kopf und 10 für die
Hände).
 |
| 20. Kamerad Technologie der UAE (vereinigte arabische Emiräte) hat ein sehr
hoch entwickeltes neues humanoid verkündet, das REEM-A genannt wird. Sie steht
1.45 m hoch, wiegt 41 Kilogramm und hat 30 DOF (Freiheitsgrade). Ihre
Spezifikation ist hier. Es gibt einige nette videos
hier.

|
21. Kawada hat jetzt das HRP-3P humanoid freigegeben. Dieser Roboter steht 160
Zentimeter hoch und wiegt 65 Kilogramm. Er hat eine Gesamtmenge von 6
Freiheitsgraden. Seite HRP-3P Kawadas ist hier (auf japanisch selbstverständlich)
ist hier ein Artikel von Engadget. Ist hier die volle HRP-3P Spezifikation mit
Losen netten Abbildungen. Ist hier das AIST Pressekommuniquã©.


|
| 22. Tmsuk von Japan hat einen neuen Roboter produziert, den sie Kiyomori
nennen. Sie haben ihre eigene Web site mit videos hier. Kiyomori wird als
SamuraiKrieger dargestellt. Dieser Bildschirm von Youtube zeigt es gehend.

|
23. JVC hat einen neuen kleinen humanoid Roboter freigegeben, der J4 genannt
wird. Es steht 20 Zentimeter hoch und wiegt nur 0.77 Kilogramm, aber es hat 26
Freiheitsgrade. Ist hier eine nette Darstellung von Plyojump.


|
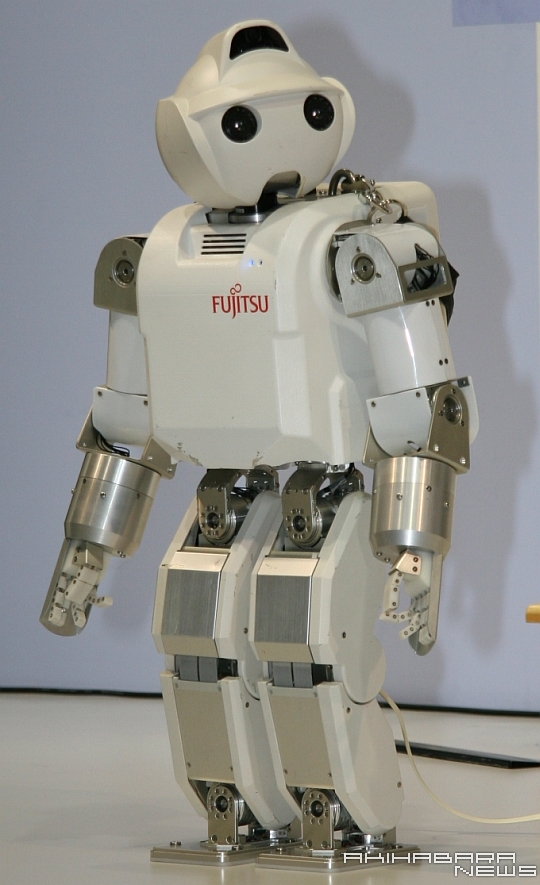
| 24. Fujitsu hat jetzt das HOAP-3
freigegeben. Dieses kleine humanoid steht 60
Zentimeter hoch und wiegt 9 Kilogramm. Ist hier ein Artikel. Dieses humanoid hat
28 Freiheitsgrade und benutzt einen 1.1 Gigahertz Pentium-Prozessor, der
Funktelegraphie-Linux laufen läßt.


|
25. Eine britische Gruppe hat einen durchführenroboter produziert, der
Robothespian genannt wird.
Dieses Projekt fing im Januar von 2005 an. Robothespian hat ungefähr 30 DOF,
steht 175 cm hoch (plus 18 cm den Standplatz) und wiegt 33 Kilogramm. Dieser
Roboterschauspieler ist jetzt für 55.000 Pfund vorhanden (US$ 85.000 oder die
7.9M Yen). Es gibt zwei Videos
hier und
hier.


|
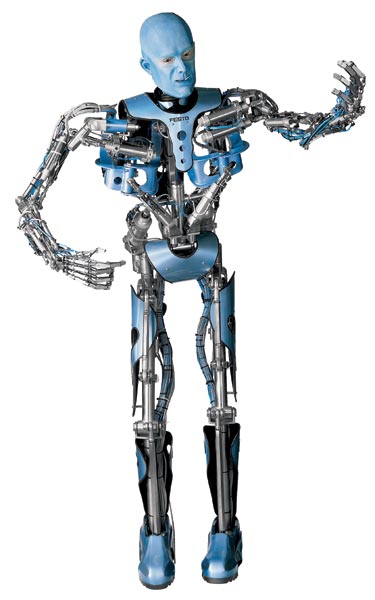
| 26. Fesco, die Pneumatikexperten, haben ein sehr
großes android benanntes Tron X
errichtet. Dieser Android steht
ungefähr 2.8 m (9 Fuß) hoch und wiegt ungefähr 300 Kilogramm (660
Pfund). Er wird vorbei über 200 pneumatischen Zylindern aller
unterschiedlichen Größen bearbeitet. Aparently dieser Android wurde in Australien 1997
errichtet. Möglicherweise ist das gegenwärtige
Modell eine zweite Version??


Tron-X - 200+ Dof
|
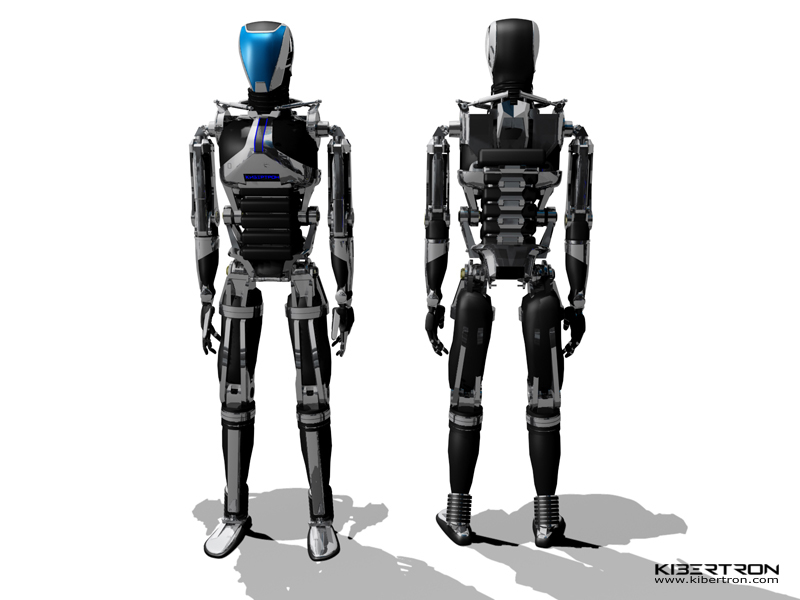
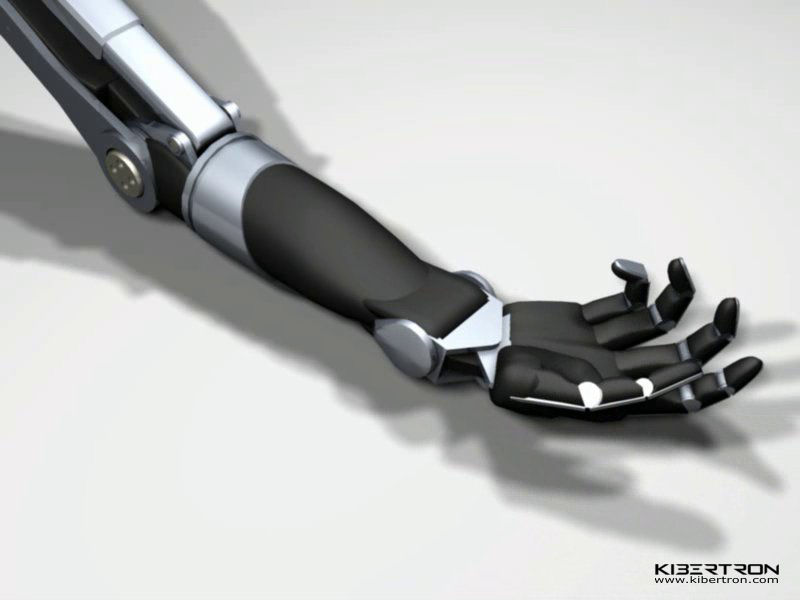
27. Eine Firma rief Kibertron Incan, gelegen in Sofia,
Bulgarien hat ein maßstäbliches humanoid Projekt, das
Kibertron genannt wurde. Ihr humanoid sieht wie ein Abschlußwiderstand aus.
Es ist hohes 1.75m (5 ' 9") und wiegt 90 Kilogramm (200
zerstößt). Sie haben einen Stab von 23. Kibertron hat 82 DOF - das viel ist. Die Hände haben 20 DOF jeder und die Arme haben 8 mehr
DOF für eine Gesamtmenge von 28 für jeden Arm u. Hand.
Ist hier ihre Projektumreiß.


vorderer u. rückseitiger Arm u. Hand
|
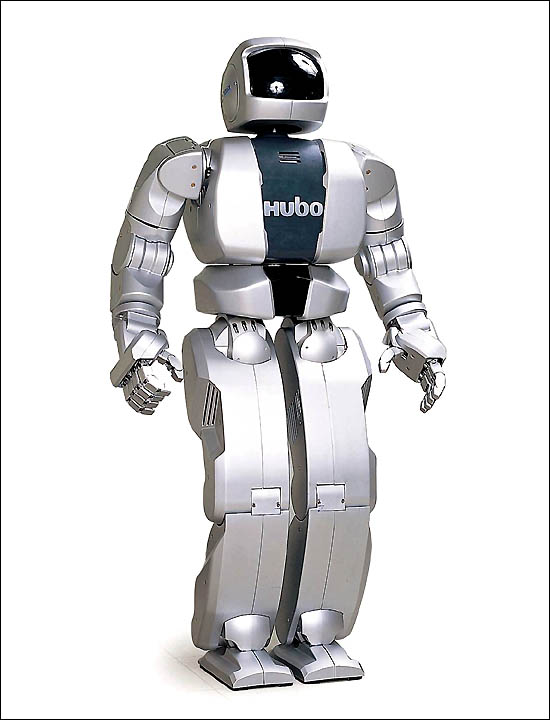
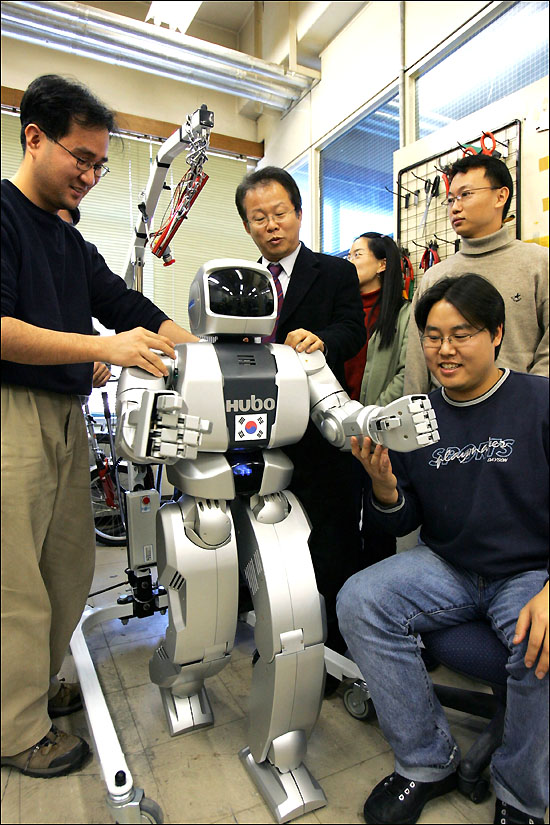
| 28. KAIST verkündet Januar 6, 2005, ein neues humanoid, das sie
HUBO nennen. Der Projektleiter ist Professor Jun-ho OH-, der auch
"KAISTian" des Jahres genannt worden ist. Ihr humanoid
hat 41 DOF, steht hohes 1.25m (49") und wiegt ungefähr 55 Kilogramm
(121 zerstößt). Ihr Android kann gehen, Rede
sprechen und verstehen. Dieser Roboter geht mit einer
Rate von 1.25 km/hr. Offenbar ist Korea oben im Welthumanoid
Entwicklung Rennen anziehend. Diese Gruppe ist in Daejeon, Korea.


Hubo
Gehen
Hubo kann seine Finger unabhängig verschieben
(während ASIMO nicht kann). Sind hier ein Paar mehr Artikel: Chosun Nachrichten und Theautochannel.
|
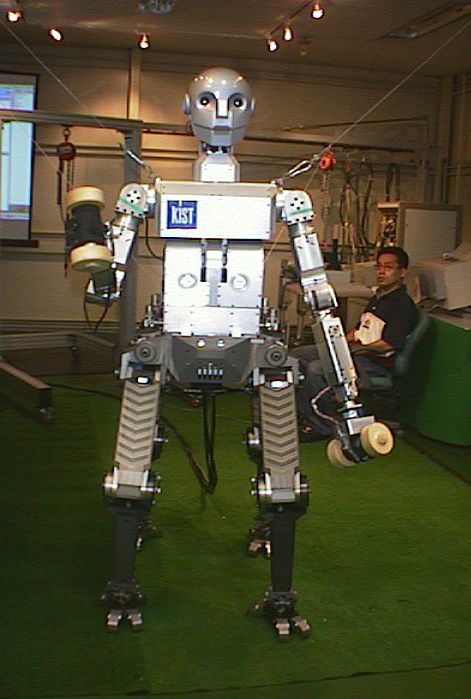
29. KIST hat zwei humanoids errichtet, die Mahru (Mann) genannt werden und
Ahru (Frau).. Die Entwicklung Mannschaft ist Leitung durch Bum-Jae-Jae You.
Diese Gruppe behauptet ihr humanoid ist das Netz-gegründete humanoid der Welt
zuerst. Es denkt wie ein Mensch und erlernt wie ein Mensch. Es steht ungefähr
hohes 1.5m (60") und wiegt ungefähr 67 Kilogramm (147 zerstößt). Es kann
gehen, Rede sprechen und verstehen. Es geht bei 0.9 km/hr. Es hat 35
Freiheitsgrade. Die Mannschaft arbeiten jetzt auf Mahru II, das 2009 freigegeben
wird.


Mahru
Mahru II
|
| 30. September 10, 2001 verkündeten Fujitsu Labors Inc. ihr Spielzeug android angerufenen
HOAP-1, ein 18"hohe zerstoßen 13 Android mit
20 Freiheitsgraden. Die Kosten sind $41.000 oder 4.8 Million
Yen. Jetzt haben sie einen anderen Android verkündet, der das HOAP-2
genannt wird. Seine ungefähr gleiche Größe.


HOAP-1 HOAP-2
|
31. An Sept. 19, 2003 verkündete Sony ein
anderes kleines humanoid, das QRIO genannt
wurde. Sein ziemlich ähnliches dem
SDR-4X. Es kann besser gehen und kann von Fällen besser erholen.
 QRIO QRIO
|
| 32. Sony führte das SDR-4X für Robodex 2002ein. Großer neuer Android,
zum gegen das HOAP-1 zu konkurrieren. Filme. Viele
Abbildungen. Artikel u. mehr
Abbildungen. 
|
33. Kawada Industries Inc. hat das HRP-2P für Robodex
2002 eingeführt. Dieses humanoid scheint, sehr eindrucksvoll zu sein. Es ist 154 Zentimeter (60"), wiegt 58kg
(127 Pfund) und hat 30 DOF hoch. Ist hier eine Nachrichten Freigabe (auf
japanisch). Beachten Sie das FEHLEN von einem Batteriesatz. Ist hier eine neue Geschichte
über HRP2. Es gibt eine neue Verbindung zu einigen videos von HRP-2 in der
Tätigkeit.
 
|
| 34. Ein zahnmedizinischer Training Roboter, der Simroid genannt wird, ist
vom Dr. Naotake Shibui, der Nippon zahnmedizinischen Universität in Tokyo
eingeführt worden, das mit Technikern bei Kokoro Co. zusammenarbeitete, um
den Roboter zu entwickeln. Es schaut sehr menschliche und gleichmäßige
Pfeifen in den Schmerz, wenn der Auszubildende einen Fehler macht.
 Simroid
Simroid |
35. Toyota Motor Company hat jetzt ein humanoid vorgestellt, das die Violine
spielen kann. Dieses zeigt eine Verbesserung in der Geschicklichkeit der Finger.
Dieser Roboter steht 1.52 m hoch und er hat 17 Verbindungen in seinen Armen und
in Händen. Der Bildschirm des Roboters "Pomp und Umstand # 5" durch Elgar
spielend ist hier.

|
| 36. Toyota Motor Company verkündete ihre lange erwartete SUITE von Androids an März 11, 2004 in Tokyo. Sie planen 4 Modelle (gezeigt auf diesem und den
folgenden 3 Eintragungen), das sie Partnerroboter
angerufen sind und entworfen sind, um als persönliche Assistenten
für Menschen zu arbeiten. Das erste man ist die gehende Version. Dieser
Android ist hohes 1.2m (4') und wiegt 35 Kilogramm (77 Pfund). Es soll die älteren Personen unterstützen.

Japanische Seite
|
37. Toyota Pläne, zum ihrer Androids an
der EXPO Ausstellung 2005 der globalen Harmonie zum ersten Mal zu zeigen, welches
folgendes Jahr stattfindet (von einem März 25, 2005 bis September 25,
2005 in Aichi, Japan. Das zweite Modell ist die Rollenversion. Dieses
humanoid rollt, herum auf Rädern aber hat einen menschlich-schauenden
oberen Körper. Es ist zu den Herstellung Zwecken
bestimmt. Es ist 1m (40") hoch und wiegt auch 35
Kilogramm (77 Pfund).

Japanische Seite
|
| 38. Toyotas drittes Modell ist leicht der ungewöhnlichste Roboter der
Gruppe. Dieses Modell wird die besteigbare Version
genannt. Es ist im Allgemeinen
ein Stuhl, der GEHEN kann! WIMMERN! Ein was für Konzept! Es steht 1.8 m (6') hoch und wiegt 75 Kilogramm (165
Pfund). Beachten Sie, daß die Person im Stuhl einen Sturzhelm
trägt. Man hofft, daß der Sturzhelm nicht notwendig
ist. 
Japanische Seite
|
39. Das vierte Modell, das von Toyota
produziert wird, ist eine Leitung-Betriebsversion. Keine Daten wurden über seine Größe oder Gewicht
gegeben. Es ist heller als die anderen und kann
schneller bewegen. Toyota hat Filme ihrer
Roboter in der Tätigkeit auf ihrem Aufstellungsort.

Japanische Seite
|
| 40. Zwei neue humanoids,
die ARNE und ARNEA genannt wurden, wurden August 5, 2003 in Rußland
verkündet. Sie wurden durch eine Str. Petersburg
Firma angerufener New Era und Kursteilnehmer von der Str. Petersburg
Polytechnik-Universität errichtet. Diese humanoids stehen 1.23
m (4') hoch und wiegen 61 Kilogramm (134 Pfund). Sie haben 28
DOF. Das Projekt, Leitung durch Alexander Yakovlev des
Roboter-technischen Sektors der neuen Ära, ist für zwei Jahre
gelaufen.

|
41. Kawasaki Heavy Industries, Tokyu Aufbau Co.,
Ltd., nationales Institut der vorgerückten
industriellen Wissenschaft und der Technologie ("AIST") und Honda haben ein neues Projekt, das
HRP-1S genannt wird. Das humanoid wurde von Honda errichtet und die
Steuer-Software wurde durch das AIST entwickelt. Dieser Artikel zeigt das humanoid, das einen
Löffelbagger laufen läßt. Wir nehmen an,
daß das humanoid die gleiche Zahl von DOF wie Asimo oder P3 Hondas
hat. 
|
| 42. Beijing Fachhochschule hat ein
anderes humanoid Projekt jetzt, das BHR-2 genannt wird. Dieses humanoid wird
"Huitong",
das Kind genannt. Es ist 160 Zentimeter hoch und wiegt ungefähr 63 Kilogramm.
Wenig andere Informationen ist freigegeben worden, aber wir nehmen an haben 32
DOF mindestens und uns entwickelten vermutlich von der gleichen Gruppe an, die
BHR-1 entwickelte.
 BHR-2
BHR-2
|
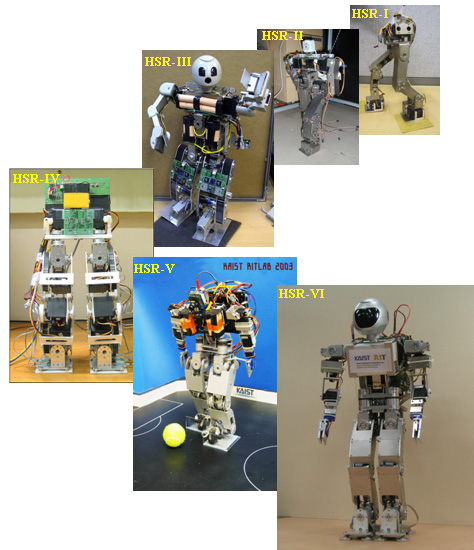
43. KAIST hat eine andere Haupthumanoid Entwicklung Bemühung am RIT (Roboter-Intelligenz-Technologie)
Labor in Daejeon, Korea. Der Projektleiter ist Professor Jong-Hwan Kim. Sie
haben ungefähr 15 Leute, auf dem Projekt zu arbeiten und sie haben eine Reihe
von 6 oder 7 humanoid Robotern das späteste errichtet von, welchem das HSR-VI
auch angerufener HanSaRam
ist. Es hat 25 DOF, aus 12 DC Motoren und 13 Servomotoren zu bestehen.
 HSR
HSR
|
| 44. Beijing Fachhochschule hat ein grosses humanoid Projekt,
das BHR-1 genannt wird. Dieser Android ist 1.58 m (5 ' 2") hoch und wiegt 76 Kilogramm (167 Pfund). Er hat
32 DOF. Er kann bei 1 km/hr mit den 33 Zentimeter Schritten gehen. Der Projektleiter ist Säurenummer des Profs Li
Kejie.Other, den Personal Qiang miteinschließt Huang, Yuechao Wang, Minute, Tianmiao Wang und Jinsong Wang. Dieser Android
scheint, sehr vorgerückt zu sein und auch ähnlich mehreren der japanischen Androids, die oben gezeigt werden.
 BHR-1
BHR-1
|
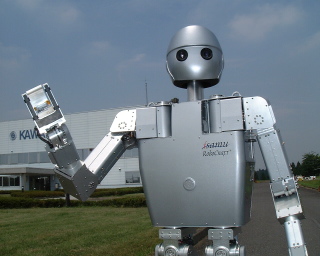
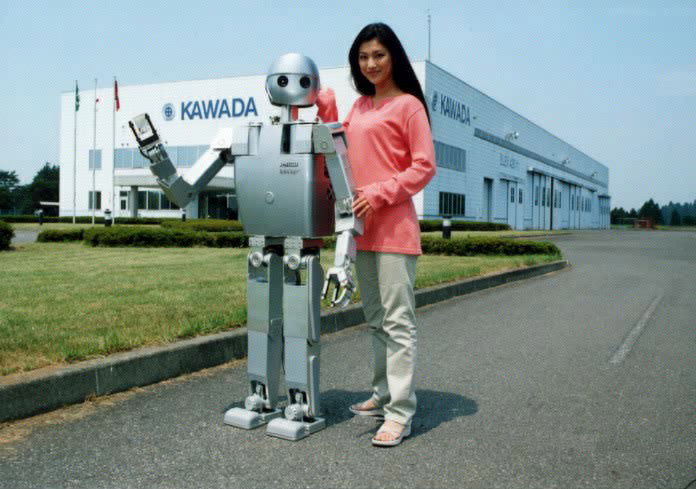
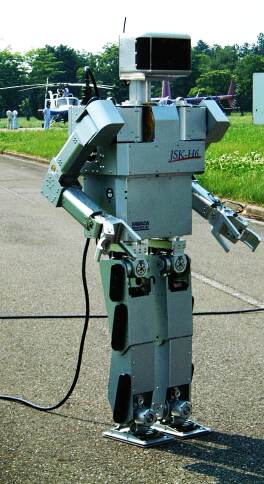
45. Das Flugzeug und
mechanische die Systeme Abteilung der Kawada Industrien Inc.. errichtete den Android H7 für Univ von Tokyo.
Sie haben jetzt ein Projekt von ihren eigenen angefangen zu verwenden etwas von der gleichen Technologie von H6 u. von H7.
Sein angerufener Isamu. 

Isamu
ist 1.5 m (5') und 6 m weit hoch und wiegt ungefähr 55 Kilogramm (121 Pfund). Es hat 32 DOF und Sie können sehen, daß der Kopf anthropomorpher als H6
oder H7 ist.
|
|
46. ECCE Roboter (dargestelltes Erkennen in einem gefällig
ausgeführten Roboter) ist ein ungewöhnlicher Humanoid dadurch, dass die Muskeln
und das Skelett nach unserem menschlichen Skelett und Muskeln modelliert werden.
Er wurde durch ein Konsortium der Universitäten einschließlich errichtet
Universität von Essex, Universität von Sussex, Universität von Zürich,
Universität von Belgrad, Universität von München und
das Roboter-Studio. Es ist eine Nebenwirkung
des Cronos-Projektes. Es hat 80 DOF. Es wurde 11. August 2009 eingeführt.
Video
1; Video 2;

|
47. Kawada Industrien führten den
NEXTAGE Montageroboter am 19.
November 2009 ein. Er ist sehr gut entworfen und schaut groß. Er hat 15 DOF und
kann Nutzlasten von 1.5 Kilogramm anheben.
Video
1; Video 2;


|
|
48. Die Universität von Teheran (der Iran) hat einen netten Roboter eingeführt,
der Surena-2 genannt wird. Dieser Roboter sieht wie zahlreiche Roboter in dieser
Liste aus. Es ist 1.45 m hoch und wiegt 45 Kilogramm. Es hat 22 DOF (12 in
seinen Beinen, 8 in seinen Händen und 2 in seinem Kopf). Dieser Roboter folgt
einem sehr ursprünglichen Surena-1, das nur 8 DOF hatte. Surena-2 übernahm
10.000 Beschäftigtenstunden Bemühung abzuschließen.
(Artikelverbindung) (Artikelverbindung) (Artikelverbindung)
(Artikelverbindung)
 Surena II
Surena II
|
|
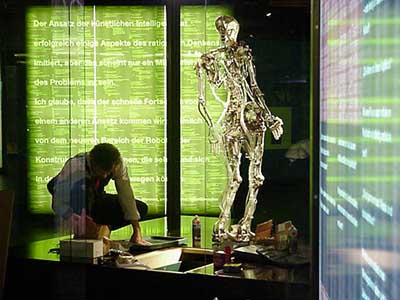
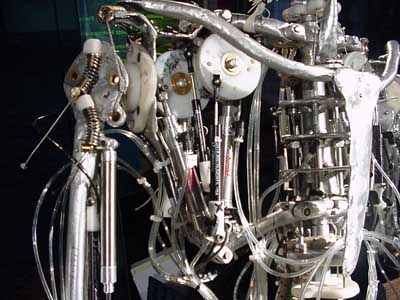
| 49. Hiroaki Kitano Kitano der symbiotischen Systeme (Tokyo, Japan)
das eine Tochtergesellschaft von Japan Science und von Technology Corp
ist (sehen die Eintragung auf dem links - # 11) das der Reihe nach
durch die japanische Regierung errichtet einen Android finanziert wird,
den er SIG nennt (symbiotische Intelligenz-Gruppe). Das Foto unter
Erscheinen SIG und Tatsuya Matsui. Kitano hat die Welt der
android Erbauer herausgefordert. Er glaubt, daß sein Android der
Archetypus ist. Wir sehen über das. Übrigens suchen
sie Leute , um ihr
Projekt zu verbinden.  
Matsui-San und SIG
|
50. Hiroaki Kitano Kitano der symbiotischen Systeme (Tokyo, Japan) das eine Tochtergesellschaft von Japan Science und von
Technology Corp ist, die der Reihe nach durch die japanische Regierung
finanziert wird, errichtet ein android Baby, das Pino angerufen wird.
Pino hat 29 Motoren und steht ungefähr 75 Zentimeter (30") hoch
und wiegt 8 Kilogramm. Ist hier eine
Verbindung zu einem Zeit-Zeitschrift Artikel.
Eine
neue Pino Verbindung, die ich vor kurzem fand.
WIMMERN! Kitano gibt jetzt weg Software- und Kleinteildesigns, die für
Pino verwendet wurden. Gehen Sie einfach HIER und unterzeichnen Sie oben.
 Pino - 8KB
Pino - 8KB
SIG-Designverbindung
PINO
Designverbindung. |
| 51. Kitano hat jetzt einen anderen kleinen android
angerufenen Morph3. Es ist 38 Zentimeter (ungefähr 15 Zoll) hoch, hat 30
DOF und wiegt ungefähr 2.4 Kilogramm = 5.3 zerstößt. Es
verwendet auch Bluetooth Kommunikationen.
 
Morph3
|
52. Früh im Oktober von 2001, Kitano verkündeten symbiotische Systeme ein anderes Projekt, das "Morph" genannt wurde. Morph verwendet das Bluetooth
drahtlose Kommunikationsprotokoll, um Befehle zu
führen dem Android und Rückgespräch vom Android zurück zu dem
Hauptcomputer zu senden. Ist hier ein anderer
Artikel. Murata ist ein Co-developer
in diesem Projekt. Morph hat 26 DOF und steht ungefähr
13.6"(35cm) hoch. Meine beste Quelle, Gianluca schickte
mir einige Verbindungen mit Abbildungen.  
|
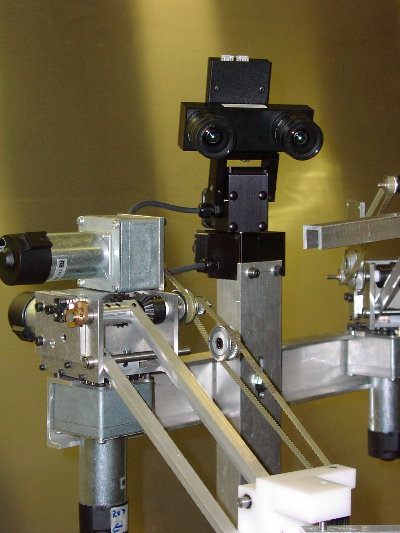
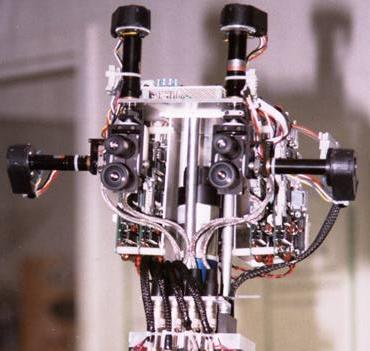
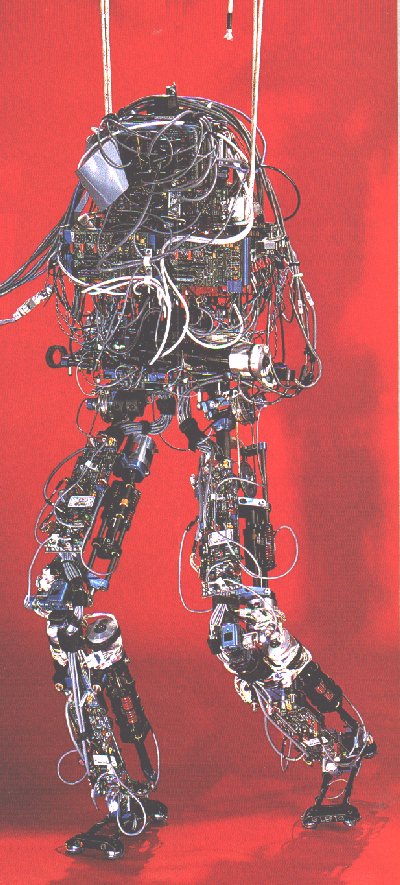
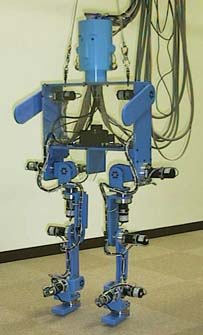
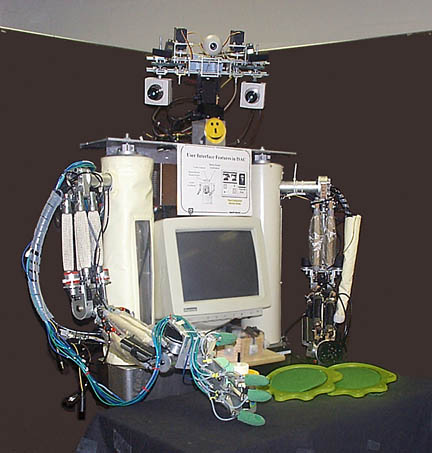
| 53. Das elektrotechnische
Labor in Tsukuba, Japan errichtet ein humanoid am
Humanoid Interaktion Labor unter der Richtung des Professors Yasuo
Kuniyoshi. Ihr humanoid wird Jack genannt, hat ihr
Android Weise über $1.000.000 - und seine Stille gekostet, die nicht
noch beendet wird. Jack wurde auch in
verdrahtetem Artikel Zeitschrift dieses Monats über Androids
gekennzeichnet. (Sept. 2000, pgs 252 - 272). Die
Beine sind im Hintergrund gerechtes kaum sichtbares. Gordon Cheng schickte mich eine andere Abbildung von
"Jack" und eine Verbindung gerade
zu einem netten Artikel. Jack hat 46
DOF.  
|
54. Tohoku Universität hat jetzt ein anderes
Projekt, das "Saika3" genannt wird. Dieser Android schaut alot
wie die Honda Androids. Es ist hohes 1.27m und 5 m weit und
wiegt 47Kg. Saika3
hat 30
DOF 
Gruppe Saika-3
|
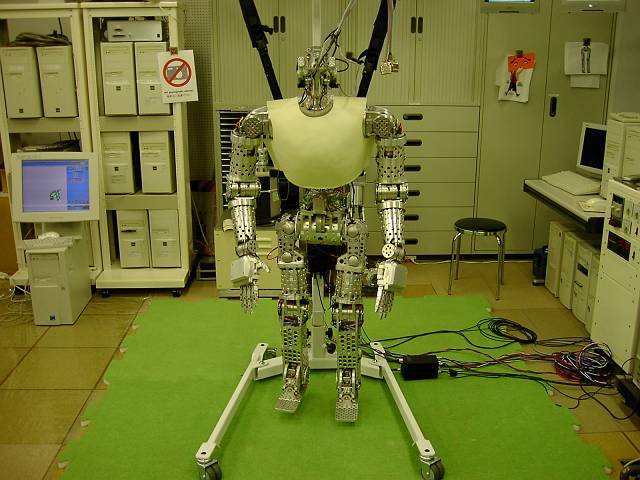
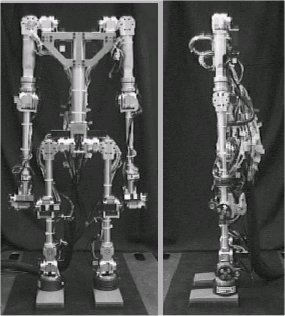
| 55. Jouhou System Kougaku Labor an der Tokyo Universität hat ein neues Projekt, das H7 genannt wird. Seine andere biped ähnliches zu H6. Eine andere Verbindung H7.
(< = neue Verbindung)


H7 ist offenbar in der Größe und in den Fähigkeiten
H6 sehr ähnlich. Sie haben einen Bildschirm 18Meg von H7 gehend
am Kawada Industrieflughafen, in dem die oben genannten Photos gemacht
wurden. |
56. Jouhou System Kougaku Labor an der Tokyo Universität hat ein Projekt, das H6 genannt wird. Sein ähnliches H5.  
H6 ist 1.37 m (4'6"), über 59 m (23") weit hoch und
wiegt 55 Kilogramm (121 Pfund). Es hat 35 DOF.
Anmerkung: Saika und H5 sind auf die
historische Android Projekt-
Seite verschoben worden. |
| |
|
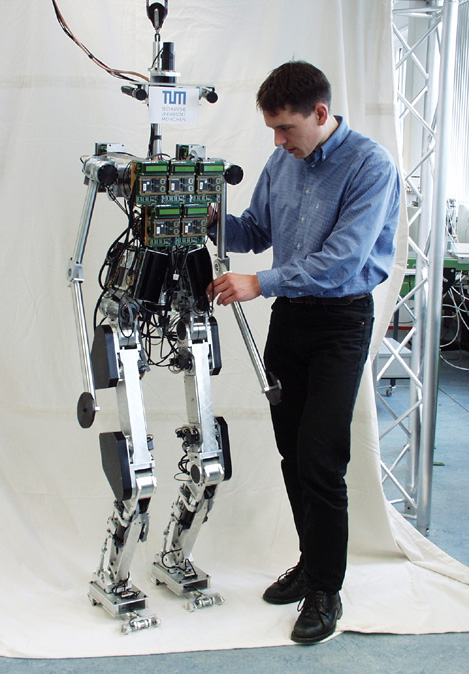
| 57. Es gibt jetzt ein zweites Hauptprojekt an der technischen Universität von München (TUM) - angerufener LOLA. Dieses humanoid hat 22
aktiv gefahrener DOF die Beine, 7 DoFs jedes zu haben, während der obere Körper zwei hat und jeder Arm vier hat.
 LOLA
LOLA
|
58. Es gibt ein grosses android Projekt,
das am Institut für angewandte Mechaniker an der technischen
Universität von München (TUM)weitergeht.
Ihr Android wird
"Johnnie" genannt und es kann bereits gehen. Sie versuchen jetzt, es LAUFEN zu lassen. Dies heißt,
daß es zwei Hauptprojekte in München gibt. Johnnie war auf Anzeige im angemessenen Hannover dieser Frühling. Sie haben
zwei videos auf ihrem Aufstellungsort. 
|
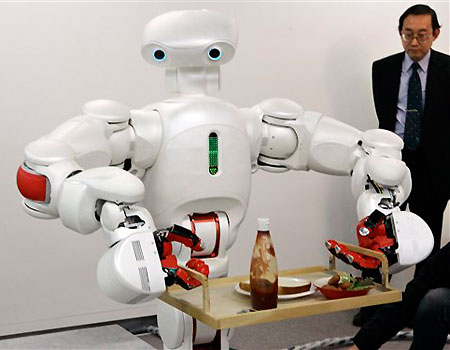
| 59. Ist hier ein anderes Projekt, das
TwendyOne vom
Sugano Labor an
der Waseda
Universität in Tokyo genannt wird. Der große Fortschritt in
diesem Humanoid ist seine sehr hoch entwickelten Hände mit den
Fingern, die Tast-Sensoren haben. Der Humanoid hat 47 DOF und steht
1.47 m hoch und wiegt 111 Kilogramm. Sie haben ein paar
Filme hier.

Twendy One |
|
| 60.
Ich empfing eine eMail vom Dr. Davut Akdas. Er hat den ersten Humanoid in der
Türkei an der Balikesir Universität in der nordöstlichen Türkei errichtet.
Sein
Humanoid wird RoboTurk genannt. Er hat insgesamt 23 DOF einschließlich 12 DOF in
den Beinen, 5 DOF im Körper und 2 DOF in den Armen. Das Gewicht ist 55 Kilogramm
und die Höhe ist 150 cm. Sein Humanoid kann vorwärts, rückwärts und seitlich
gehen. Er kann kleine Schritte sogar klettern. Wow! Großer Job!


|
61. Prof Gordon Wyeth und mehrere seiner
Kursteilnehmer haben ein Projekt begonnen, das GuRoo genannt wird (für grob Underfunded
Roo) an der Universität von Queensland, in Brisbane, Australien. GuRoo hat 23 Freiheitsgrade
und steht 1.2 m
hoch. Sein projiziertes Gewicht ist 30kg. Guroo teilnahm am
neuen Robocup 2002 in Japan. Die Mannschaft hat 6 Leute. Eins der Mannschaftmitglieder,
Damien Kee, hat einige videos ihres
Android bekanntgegeben, der seine ersten vorläufigen
Schritte unternimmt. Ordentlich!

|
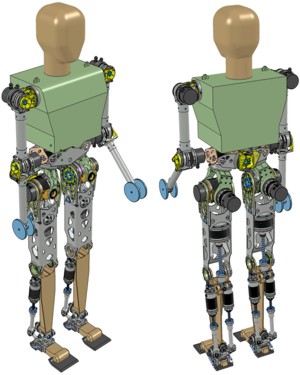
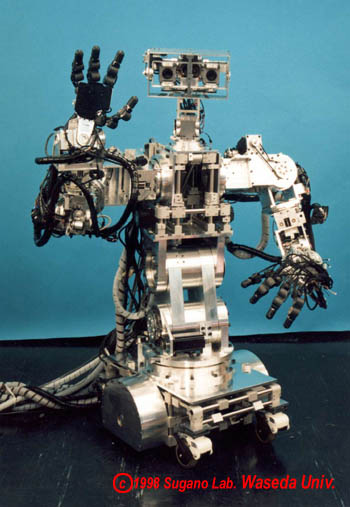
| 62. Japan Science und Technology Corp
(Kyoto, Japan) hat vor kurzem
ein 5-Jahr-Projekt
aufgedeckt, um einen humanoid Roboter zu errichten. Dieses Projekt fing im Oktober von 1996 an. Der
Projektleiter ist Dr. Mitsuo Kawato und sie haben einen Stab von
ungefähr 18. Ihr humanoid Roboter wird DB
genannt (sehen Sie unten).
 Bild 32KB Bild 32KB
|
63. Die technische Universität von
Darmstadt hat ein humanoid Projekt unterwegs jetzt. Ihr humanoid wird Lara
genannt. Es ist 130 Zentimeter hoch und hat 18 DOF, die aus 38 Nitinol Leitung
Muskeln bestehen. Der Mannschaftführer ist Professor Oskar von Stryk und sie
haben ungefähr 15 Kursteilnehmer, auf dem Projekt zu arbeiten.
 Lara
Lara
|
| 64. Das Schattenprojekt (London, England) diese Gruppe entwickelt eine humanoid bipedal gehende Maschine. Sie haben auch einige Produkte für Verkauf. Ihr Personal schließt ungefähr 14 Leute mit ein. Unter ist ein
Bild ihres bipedal Wanderers.
 208K
208K |
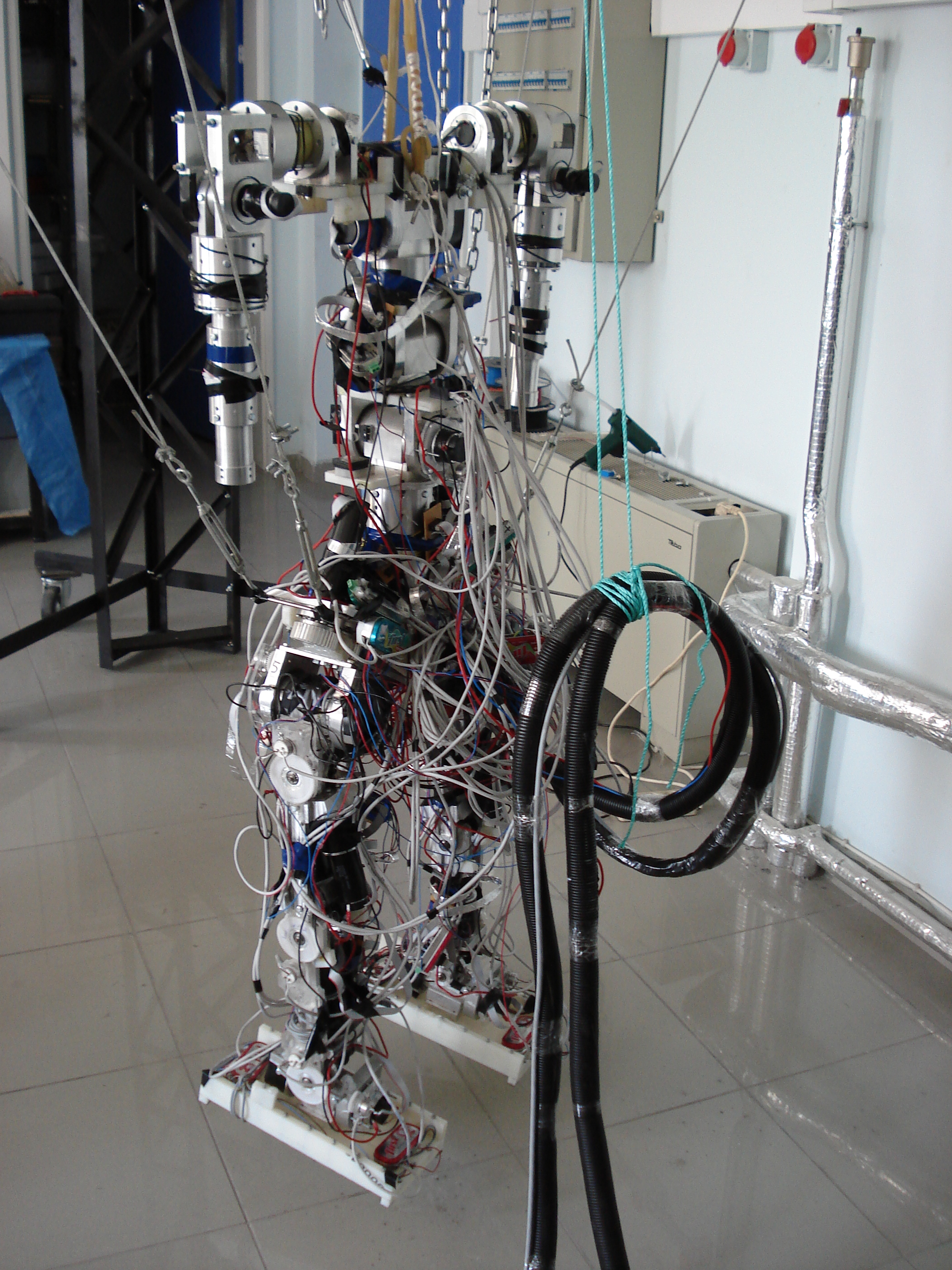
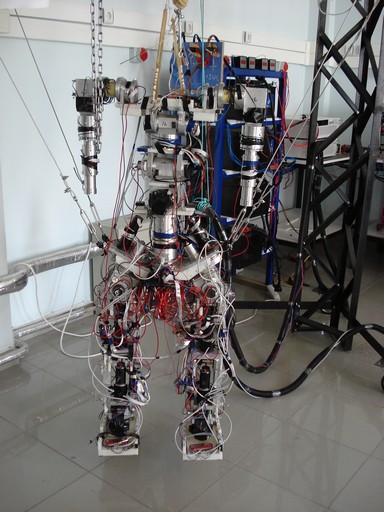
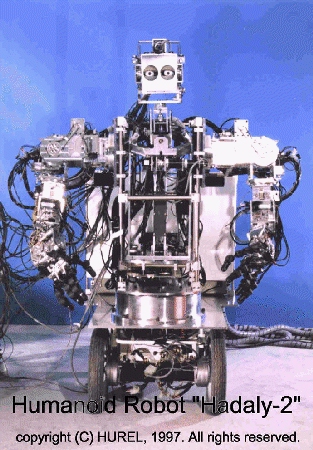
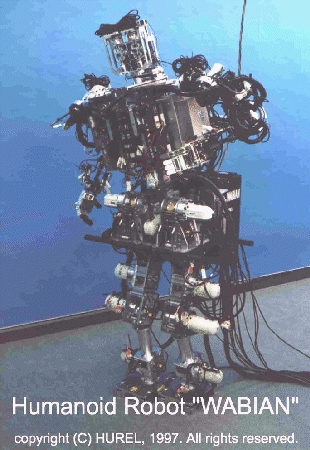
65. Waseda Universitätshumanoid
Projekt
(Tokyo, Japan) ihr Android ist ungefähr 6 hohes Fuß und wiegt über 600
zerstößt. Es kann gerade kaum
gehen, aber. wurden dieser Android und Android Hondas auf dem PBS
Programm gekennzeichnet, das "die steigenden Roboter" genannt wurde,
die dreimal im März, 1998 lüfteten. Das Waseda Humanoid Projekt besteht
aus sechs Gruppen:
Unter sind Bilder von Hadalay-2 und von Wabian.


|
| 66. Nationales Institut der vorgerückten
industriellen Wissenschaft und der Technologie in Tokyo (AIST) stützt
15 Forschungsinstitute in Japan einschließlich die 8 im Tsukuba
Wissenschaft Stadtnorden von Tokyo. Sie fördern ein humanoid Projekt, das 1998
angefangen wurde. Sie haben wirklich viele Projekte. 

Über sehen uns, daß ein P3 und auf dem Recht die Beine
von HRP sind, das erlernt zu gehen.
|
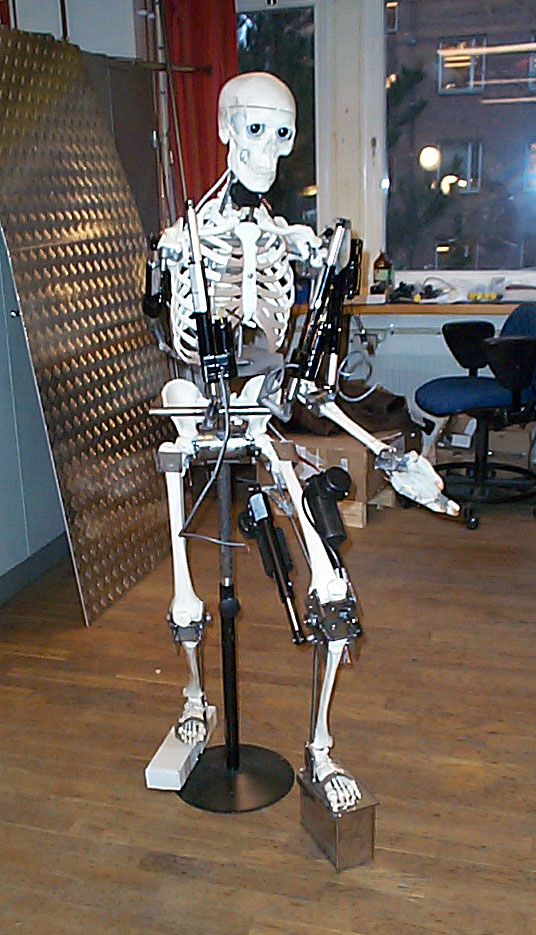
67. Chalmers Universität hat auch ein maßstäbliches android Projekt, das
Priscilla genannt wird, der am Sommer von 2000 begonnen wurde. Sie basiert
auf einem vollen sortierten Skelett eines Menschen. Sie wird
durch Hydrozylinder angetrieben. Sie können sehen, daß
sie binokularen Anblick hat.  Priscilla.
Priscilla.
|
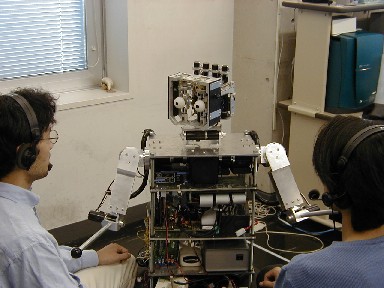
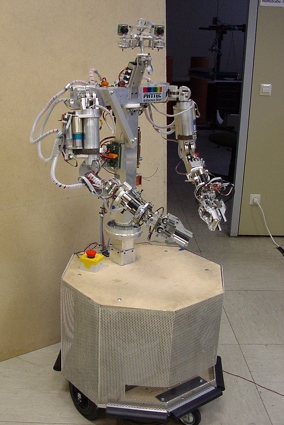
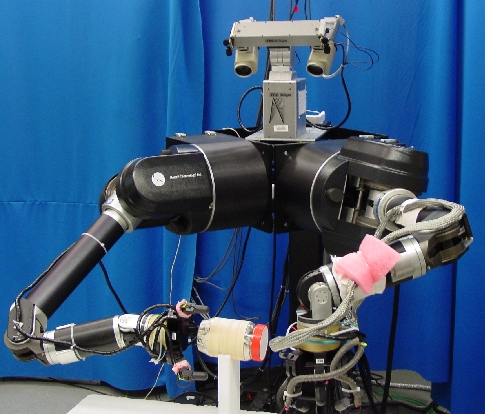
| 68. Die Universität von
Tokyo hat ein grosses Projekt, das Telesar2 genannt wird.
Sie besteht aus zwei Hauptsystemen: 1. Der
anthropomorphe obere Körper mit den Armen und Kopf brachte an einem
drehenden Aufsatz an. und 2) ein Steuersystem, das
einige Monitoren hat und zwei Handkontrollen, die der menschliche
Operator auf seinen/ihr Händen trägt. Dieses scheint
ziemlich einzigartig. Die Hände scheint, sehr hohe
Qualität zu sein. Das Projekt ist Leitung durch Dr.
Tadakuma des Tachi Labors der graduierten Schule von
Informationswissenschaft und Technologie beim Univ von Tokyo. Sie haben Lose videos auf ihrem Aufstellungsort. Sie stellten ihre Systeme am Welt-EXPO 2005 in
AICHI, Japan von einem Juni 9 bis Juni 19, 2005 aus
 Telesar 2.
Telesar 2.


|
69. Das Maschine
Steuerlabor an KAIST bei Teajon, Korea hat ein
anderes humanoid Projekt, das den KAIST Humanoid Roboter (KHR-1) genannt wird. Dieses Projekt fing im Januar von 2002 an und
schließt jetzt Prof Jun-Ho OH- und 12
Kursteilnehmermit ein. Das KHR-1 steht 1.2 m
hoch und wiegt 48 Kilogramm. Es hat 21 DOF und kann
gehen. Es gibt videos auf ihrem Aufstellungsort.


|
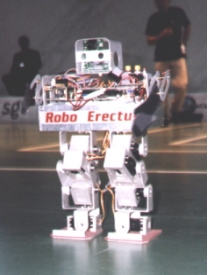
| 70. Das ARICC (vorgerückter Automatismus und
intelligente Steuermitte) in der Schule der elektrischen und
elektronischen Technik, Singapur Polytechnik hat ein Haupthumanoid Projekt zu gehen in,
welchem sie der Gebäudefußball sind, der humanoids spielt. Sie
haben einige humanoids, das späteste errichtet von, welchem
Robo-Erectus III angerufen wird. Es steht 50 Zentimeter
hoch und hat 22 DOF. Das Projekt schließt ungefähr 15 Mitglieder ein und ist Leitung
durch Prof Changjiu Zhou. 

|
71. Imperiale Hochschule London haben zwei humanoid Projekte. Sie
haben eine Hälfte eines humanoid, das ZAHN - angerufener
Ludwig ähnlich ist. Sie haben auch zwei kleine humanoids, die leichten
Schlag u. Plumpsen, die, genannt werden ungefähr hohes 14"stehen. Sie haben Filme von Ludwig. Die Primärerbauer
sind: Murray Shanahan, Yiannis Demiris, Dave Randell und
Markierung Witkowski.


Ludwig
Flip & Flop |
| 72. Tohoku Universität hat auch ein bipedal gehendes Roboter- Projekt. Dieses Projekt ist unter der Richtung des Profs Takashi
Emura am Emura Labor. Sie haben 4 Professoren und
ungefähr 20 Kursteilnehmer. Ihr Ziel ist, eine Menschlichart
autonomen Roboter zu errichten. Sie haben auf dem
Projekt für mindestens ein Jahr gearbeitet. Unter ist ein Bild
ihres bipedal Wanderers - benanntes Monroe nach Marilyn Monroe.  Bild 17KB
Bild 17KB
|
73. Politecnico di Torino hat ein Haupthumanoid Projekt. Es
wird Isaac genannt. Der Führer ist Prof Guiseppe Menga und 7 Kursteilnehmer
arbeiten auch auf dem Projekt. Isaac ist ungefähr 61
Zentimeter (24 Zoll) hoch und wiegt ungefähr 7 Kilogramm (15
zerstößt), das er 16 DOF hat und er wird durch ein PC104
gefahren. Ihr humanoid gewann 2. Platz im Robocup 2003.
 Isaac u. Mannschaft.
Isaac u. Mannschaft. |
| 74. Ein chinesischer Android wurde
Dezember 1, 2000 verkündet. Dieser Android
ist 1.4 Meter (55 Zoll) hoch und wiegt 20kg (44 Pfund). Er wurde
China Wissenschaft und Technologie-an der Universität für
Nationalverteidigung in Changsha, Hunan, China errichtet.
Aparently errichteten sie eine andere Androidrückseite 1990.
Sie sagen, daß "Pionier" in einigen Sprachen gehen und sprechen
kann. Sehen Sie über Artikel für Details.  Pionier (14KB)
Pionier (14KB) |
75. Chalmers Universität in
Goteburg, Schweden hat 3 Projekte jetzt. Sie
haben das Elvis Projekt , das
jetzt mit ihrem zweiten Prototyp arbeitet, und neuen kleinen gehenden
android angerufenen Elvina. Ihr Stab ist
ungefähr 13. 

Elvis #2
Elvina |
| 76. Massachusetts Institute of Technology - das ZAHN-Projekt
Cambridge, Masse,
USA dieses Projekt entwickelt ein humanoid auch. Ihr humanoid hat einen Kopf mit vier Augen (zwei für
das Ende hoch und zwei für Abstand), zwei Armen und einem
Torso, aber es hat keine Beine schon. Sie haben zwei Professoren und ungefähr 7 Kursteilnehmer. Sie behaupten auch ungefähr 10 Schüler. Die
Projektleiter sind Rodney Bäche und Lynn Stein. Etwas von dem
besten pix des ZAHNS sind auf Rodney Bachhome
Page. Unter sind Bilder des ZAHNS und der
Nahaufnahme seines Kopfes (mit 4 Augen). 

|
76b. Das MIT
Beinlabor hat einen Satz Beine errichtet, der zum
ZAHNTORSO bald verbunden werden soll. Die Beine,
genannt worden das M2 Projekt, werden in verdrahtetem
Artikel Zeitschrift dieses Monats über Androids gekennzeichnet. (Sept. 2000,
pgs 252 - 272).
 111KB
111KB |
| 77. MIT hat ein neues Projekt, das Coco genannt wird. Es soll
ein kleiner oder möglicherweise Babygorilla sein. Es hat 15 DOF
und wiegt ungefähr 20 zerstößt. Coco ist
ungefähr 12"(30 Zentimeter) das Quadrat. 
|
78. Yokohama nationale Universität hat ein bipedal gehendes Roboter-
Projekt auch. Dieses Projekt ist unter der Richtung
des Profs Atsuo Kawamura am Kawamura Labor. Sie haben mindestens
5 Personalmitglieder.
Ihr Ziel ist, eine Menschlichart autonomen Roboter zu errichten. Sie haben auf dem Projekt für mindestens ein Jahr
gearbeitet. Unter ist ein Bild ihres bipedal Wanderers.
 Bild 19KB
Bild 19KB |
| 79. Fukuda Labor an
der Nagoya Universität hat ein Projekt, das das biologische angespornte Roboter-System (BIRS) genannt
wird. Ihr Roboter scheint, hoch zu
sein ungefähr 1.5 m und hat 20 DOF. Sie haben einen
Personal von vier Professoren und von ungefähr
30 Kursteilnehmern, die auf ihm arbeiten.
|
80. Die Korea Seeuniversität von Pusan, Korea hat ein bipedal android
hauptsächlichprojekt unterwegs. Sie schaut einigen der
japanischen Projekte wie des Tohoku Universitätsprojektes ziemlich
ähnlich (sehen Sie #20 oben). Ist hier die Verbindung -
auf koreanisches oder englisch.

|
| 81. Ist hier der erste iranische Android. Es wird Firatelloid genannt
(zuerst iranisches intelligentes Humanoid).
Sie haben einige Filme auf ihrer multi-media Seite. Die
Hauptentwickler sind Mohamad Shayganfar und Benjamin Fonooni von der Azad Universität von Arak. (Arak, Der Iran).
 Firatelloid.
Firatelloid. |
82. Ist hier der "kopflose Reiter" der Castrol Motorradfirma von Pangbourne,
Großbritannien. Der Roboter wurde wirklich von Stahle
Gmbh von Neuhaussen, Deutschland errichtet. 
Dieser Roboter hat zwei Arme und zwei Beine und wird am
Motorrad angebracht.
|
| 83. Das Humanoid
Automatismus-Labor in Linz, Österreich hat ein
Barbot - einen anthropomorphen Roboter
errichtet, der Bier am Stab kauft und es TRINKT! Dieses ist das erste humanoid, das ich gesehen habe,
welches alles ißt oder trinkt. Sie nehmen Vorschläge
auf, wie man das Bier in Energie, den Roboter laufen zu lassen
umwandelt. Er ist hohes 1.7m und wiegt und 30 Kilogramm.
Barbot hat 7 DOF und kann für Ihre Partei oder Fall
angemeldet werden.
 Barbot - Linz, Österreich
Barbot - Linz, Österreich
|
84. Die Amorphic
Roboter-Arbeiten von München Deutschland hat ein
bewegliches menschliches Skelett errichtet, das sie Skelli nennen.
Es ist die
Größe eines normalen Erwachsenen und hat 34 DOF einschließlich 16
in seinem Gesicht. Eine vorgerückte Fernmessungklage erlaubt
einem Teilnehmer, das Maschine Verhalten zu unterrichten.
Entwarf, Allgemeinheit mit Menschheit, einige der Ausdrücke,
die diese humanoid Maschine sind Furcht, verkündet Zorn, Freude,
sorge, Überraschung und Ungeduld zu reflektieren.
 Skelli mit Chico MacMurtrie
Skelli mit Chico MacMurtrie
 Schulterdetail von Skelli.
Schulterdetail von Skelli.
|
| 85. Waseda Universitätshumanoid
Projekt hat ein anderes Projekt, das "Wendy"
genannt wird. "Wendy" ist Halady ähnlich. Es hat eine
Gesamtmenge von 52 DOF. Passen Sie auf, daß ihr Text im
Weiß ist, also druckt er heraus richtig - nicht mindestens auf einem
Farbdrucker. Ist hier eine Abbildung von Wendy.  Bild ist 42K.
Bild ist 42K.
|
86. Jetzt hat Waseda Universität ein anderes
Projekt, das iSHA genannt wird. Dieses humanoid hat 26 DOF, die meistens durch
Elektromotoren angetrieben. Es kann 2 Stunden lang autonom
funktionieren. WIMMERN! Sehr eindrucksvoll!
 iSHA.
iSHA.
|
| 87. Waseda hat ein anderes Projekt (das ich
schließlich fand), angerufener Robita. Es ist entworfen, um Umwandlungen mit Leuten zu
leiten. Sie haben einige Filme auf Yosuke Matsusakas Seite.
Dieses Projekt ist seit Juni 1999 aktiv gewesen.
 Robita
Robita
|
88. Waseda Universität hat auch ein
Projekt, das Wamoeba
genannt wird. Sein errichtend am Sugano Labor. Es
scheint, daß es 3 Versionen seit 1995 gegeben hat. Die
Abbildung folgend ist - angerufener Wamoeba 2Ri das späteste.  Wamoeba - 2Ri
Wamoeba - 2Ri |
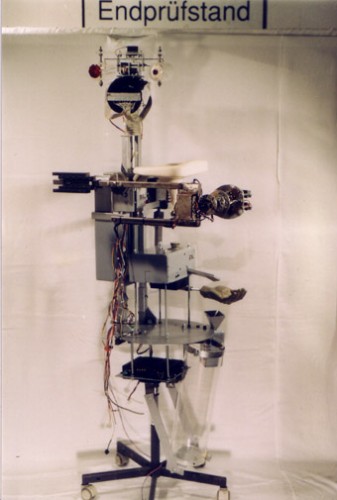
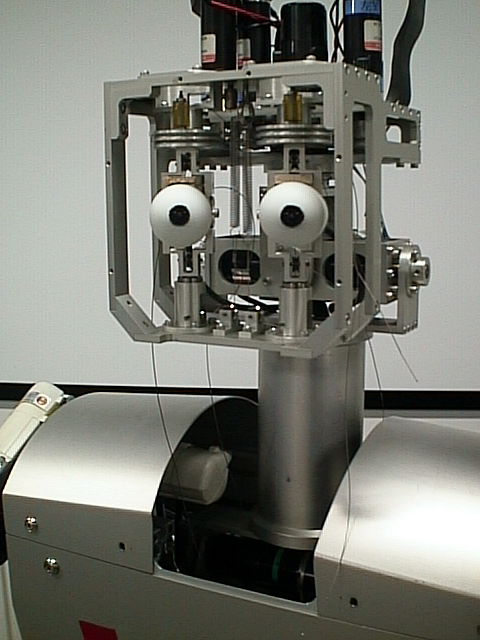
| 89. Ein Humanoid Roboter-System wird im
intelligenten
Automatismus-Forschungszentrum des Korea Instituts der Wissenschaft und der Technologie in Seoul, Korea
entwickelt. Das Ziel ist, a menschlich-wie autonomer Roboter zu
errichten. Der Name dieses Projektes ist ZENTAUR
- nach dem Hälfte-menschlichen Hälfte-Pferd von der griechischen Mythologie -
und er hat 4 Beine. Gegenwärtiger Stab ist 14. Die
Abbildung folgend ist das menschliche obere Körperteil. Sie haben auch ein Anblickauge Korrdination Projekt hier.
(* örtlich festgelegte Verbindungen 09/11/03 *) 

|
90. Das Articifial
Intelligenz-und Mittel-Labor des Korea Instituts der Wissenschaft und der Technologie
haben jetzt zwei Projekte unter developement.
Sie haben das ZIEL-Projekt und das AIMET
Projekt. Sie werden auf dem Taejon Campus in Taejon, Korea entwickelt. Sie haben einige videoauch zu betrachten clips.


ZIELEN Sie
AIMET (nach links), ZIEL (Mitte) |
| 91. Die Universität von
Florida hat ein humanoid Projekt an ihrem Maschine Intelligenz-Labor,
Gainsville, Florida. Ihr humanoid wird Pneuman genannt. Die
eingeschlossenen Professoren sind: Antonio Arroyo, Michael
Nechyba, Eric Schwartz. Es gibt auch viele Kursteilnehmer, die auf dem Projekt
arbeiten. Das humanoid ist 59 Zoll hoch,
wiegt 102 Pfund und hat 25 DOF. Ist hier ein anderer Artikel, den ich fand.
 Pneuman.
Pneuman. |
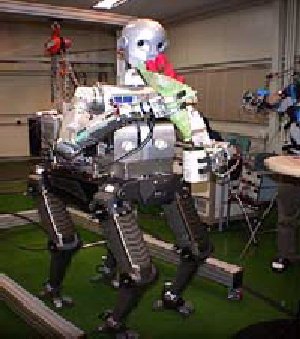
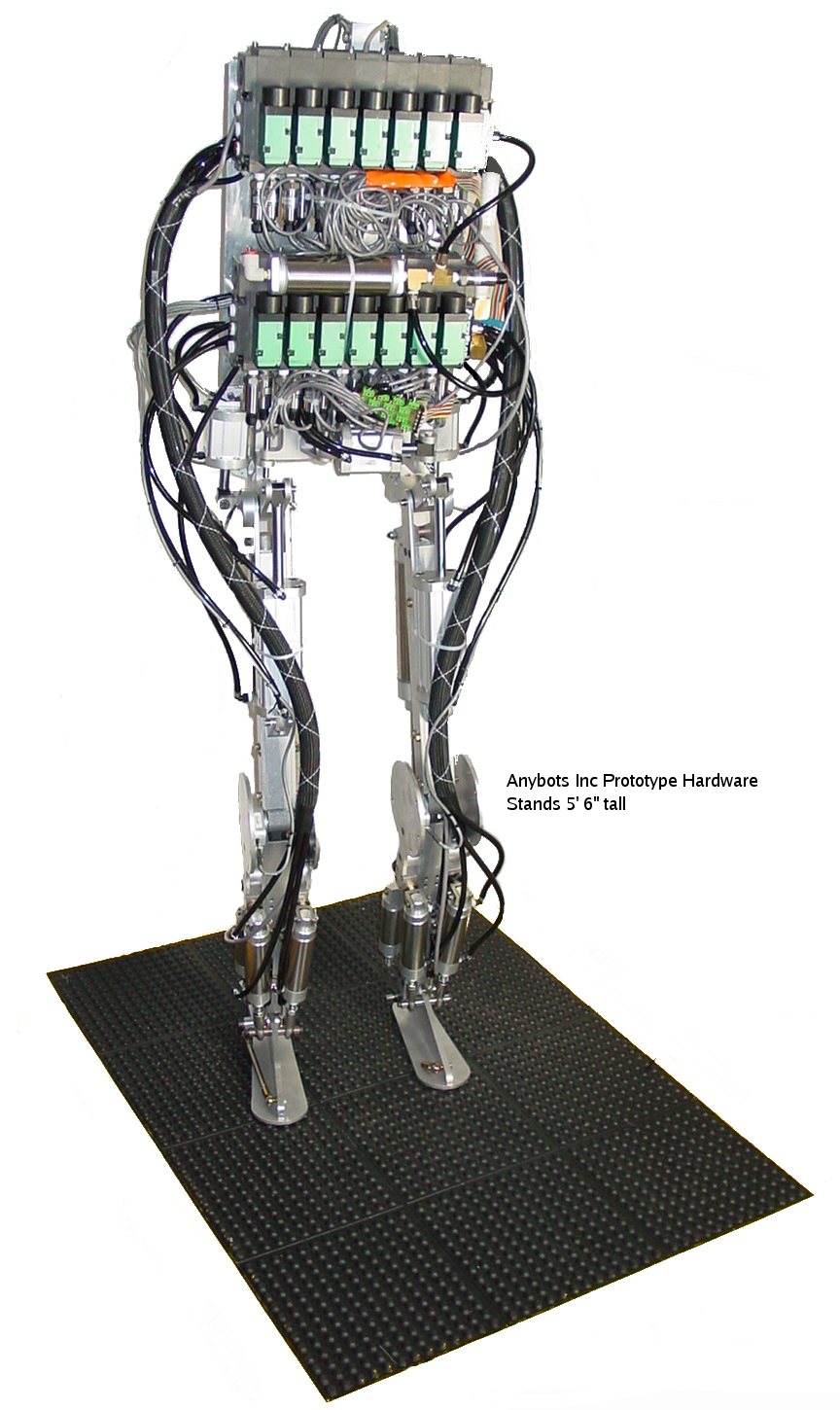
92. Anybots des Mountain
View, Kalifornien hat ein maßstäbliches humanoid Projekt unterwegs. Es scheint, daß jedes Bein 7 DOF hat. Sie
haben einen Bildschirm ihrer Beine, die vertikal ausgleichen. Sie haben auch Prototypen der Hände.

|
| 93. Die Universität von Karlsruhe in Deutschland hat ein grosses Projekt, das SFB 588, ein
humanoid Roboter genannt wird. Ihr
Roboter hat nicht Beine noch, aber er scheint, sehr fähige Hände mit
ungefähr 15 DOF für jede Hand zu haben. So würde die
gesamte Zahl zwischen 40 u. 50 DOF sein. 
 Nizza Hände.
Nizza Hände. |
94. Das Institut der Maß-Wissenschaft an der Bundeswehr
Universität von München (Deutschland) hat ein grosses Projekt, das
Hermes genannt wird.
Meine appologies zu ihnen für sie nicht vor langer Zeit
verzeichnen. Dieses Projekt ist seit 1996 gegangen. Der
Hauptforscher ist Rainer Bischoff und es gibt 7 andere Personalmitglieder
und ungefähr 35 letzter Personal und Kursteilnehmer, die auf dem Projekt
bearbeitet haben. Sie haben guten Fortschritt gebildet. 
|
| 95. Carnegie Mellon Universität (CMU) und die
Universität von Pittsburg begannen ein Hauptprojekt, das das
Nursebot ,mit einer
Bewilligung $1.4 Million vom National Science Foundation genannt
wurde. Dieses scheint, sehr groß zu sein, weil sie
so vieles wie 50 Leute haben, die
auf verschiedenen Teilen von ihm
arbeiten. Sie scheinen, zwei Prototypen zu haben:
Perle und Florenz. Sein ungefähr 4 Fuß hoch.  50 KBS
50 KBS
|
96. Tamim Asfour, ein Absolventkursteilnehmer an
der Universität von Karlsruhe (Deutschland), ist ein Teil eines
Hauptprojektes, das ein humanoid errichtet, das ARMAR genannt wird. Zahl des
Personals: Unbekanntes zu mir. 
ARMAR - 124K
|
| 97. Die Universität von Massachusetts bei
Amherst hat ein humanoid Projekt am Labor für
Wahrnehmungsautomatismus. Prof Roderic Grupen
ist der Direktor. Sie haben vier
Professoren auf dem Projekt und ungefähr 20 Kursteilnehmer. Sie haben die Hälfte eines humanoid errichtet -, das MIT
u. Vanderbilt ähnlich ist. Ihr humanoid hat ungefähr 29 DOF,
einschließlich 2 Funktionsarme (7 DOF jeder) und zwei 3
fingrige Hände (4 DOF jeder).
 UMass humanoid. UMass humanoid. |
98. Vanderbilt Universitätsschule der Technik hat einen
humanoid Roboter, der ISAC unter
Entwicklung genannt wird. Dieses Projekt hat
vier Professoren und 23 Kursteilnehmer. Das Projekt ist
unterwegs für ungefähr 5 years.Their das gegenwärtige Ziel ist,
ISAC zu ermöglichen, von seinen eigenen Erfahrungen zu erlernen und
auf Leute in einer natürlichen Weise einzuwirken gewesen.
Schließlich ist ISAC ein Inhaus Obachtgeber für das ältere
oder das schwach. Der Direktor der Mitte für
intelligente Systeme ist Prof Kawamura. Ihr Personal schließt
Profs mit ein. Peters, Wilkes, Biswas und Gaines.
 Bild 46KB
Bild 46KB
|
| 99. Das ProtoAndroid
Projekt (Austin, Texas) dieses Projekt wird durch
Faustex Systems Corporation
finanziert, dessen Gründer und Präsident
David Santos ist. Dieses Projekt ist unter Entwicklung seit 1992
mindestens gewesen. Es ist 6' hohes 4"und wiegt ungefähr 300 zerstößt.
Größe des Personals ist ungefähr 5. Sie haben auch den
kriegerischen Roboter der künste H2
errichtet, der
unten gezeigt wird.
 116K.
116K. |
100. Thailand hat jetzt sein erstes android Projekt. König Mongkuts University der Technologie bei
Thonburi errichtet einen Android auch. 
|
| 101. Begonnen 1996, bietet
Aandroyds
Inc.
eine Linie von 2, 4
und 6 legged Maschinen für Verkauf an. Die Maschinen sind für
Haus, Büro und Industrie bestimmt, mit den kundenspezifischen
vorhandenen Labor- und Raummodellen. Finden Sie sie an Aandroyds.com. |
102. Dr. Jennifer Best an UCLA führt ein neues android Entwicklung Projekt .
Ihre Hauptnetzverbindung
kann möglicherweise nicht arbeiten, weil ihr Bediener
unten ist. Sie konnten dieses versuchen. Mit einer Hauptschule
mögen Sie UCLA, das dieses Projekt unterstützt, ich sind sicher,
daß wir große Sachen erwarten können. |
| 103. Kumoh nationale Universität der
Technologie in Seoul, Korea hat ein Projekt, das
einen Minihumanoid Roboter errichtet. Sie wird durch die
mechatronics Gruppe errichtet, die ein Teil der
Maschinenbauwesenabteilung ist. Sie behaupten, daß ihr humanoid
Roboter auf und ab Treppe gehen kann. WIMMERN! Sind hier
ein Paar der Papiere, die ich fand. [ 1 ] Y. W. Sung und S. Y. Yi, "ein Minihumanoid
Roboter, der auf und ab Treppe gehen kann", Proc. vom
internationalen Symposium auf Robotics'2001, Seoul, Korea, 2001
[ 2 ] Y. W. Sung und S. Y. Yi, "die Entwicklung
eines Minihumanoid Roboter-Systems", Proc. vom internationalen
Symposium auf Automatismus und Automatisierung 2000, Monterrey,
Mexiko, pp.133~138, 2000
|
104. Tsinghua Universität
in Beijing, China hat einen bipedal humanoid
Roboter Projekt angerufenen THBIP-I. Dieses Projekt ist
einige Jahre alt. Ist hier ein
Nachrichten Artikel. Sind hier einige
Papiere, die ich fand: [ 1 ] "das Biped Li des Roboter-Humanoid THBIP-I" Liu,
Jinsong Wang, Ken Chen, Jiandong Zhao und Dongchao Yang (Tsinghua
Universität, China)
[ 2 ] "Gait-Planung des Humanoid Roboters basiert auf
Anticipant ZMP Tranck" Dongchao Yang, Li Liu, Jinsong Wang, Ken Chen
(Tsinghua Universität, China)
[ 3 ] "eine neue Methode des Gait-Erzeugung für einen
Biped gehenden Roboter" Kai Xu, Ken Chen, Jinsong Wang, Li Liu,
Dongchao Yang, Jiandong Zhao
Institut der Herstellung Technik, Tsinghua
Universität, China |
| 105. Intelligente Masse, eine
Firma, die in Kirkcaldy, Schottland gelegen ist,
hat ein neues Projekt verkündet, um einen voll sortierten gehenden
und sprechenandroid zu errichten. Die Ansage erschien am Ende dieses Nachrichten Artikels vom BBC.
 Doki Doki
|
106. Die Universität von
Freiburg in Freiburg, Deutschland begann ein erlernenhumanoid Roboterprojekt im Januar
von 2004. Das Projekt, genannt
Nimbro, wird von Sven Behnke verwiesen und wird ungefähr 12 Leute
miteinbeziehen. Sie werden ein humanoid errichten, das
ungefähr 150 Zentimeter (5 Fuß) hoch ist und ungefähr 38 Kilogramm
wiegt. Es hat 22 DOF. Sie möchten im
Robocup Humanoid konkurrieren Fußballturnier.
|