|
1.
Kawadaの企業と共の日本の高度の産業科学技術(AIST)の国民の協会は今HRP-4Cの人体ロボットを解放してしまった。
この人体ロボットは1.58メートルを高い立てる(62") そして43のKg = 95ポンド重量を量る。 それは若い女性のように見えゆっくり歩き。
彼女に30 DOFあり、約20,000,000円のためにか$200,000が販売する。
あるビデオはここにある。

 |
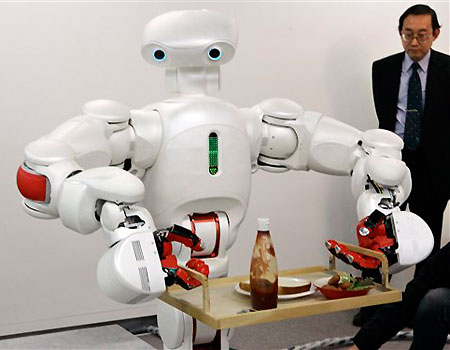
2. Kokoroおよび大阪大学は新しくリアルな人間の特徴をもつ呼ばれたActroid DER3 (DER2への後継者)を開発した。
これらのアンドロイドは人間および話を非常に見、彼らの頭部、腕、手およびボディを動かす。
DER2 (記事リンク) (場所リンク) (youtubeリンク)
DER3
(記事リンク) (場所リンク) (youtubeリンク)


|
|
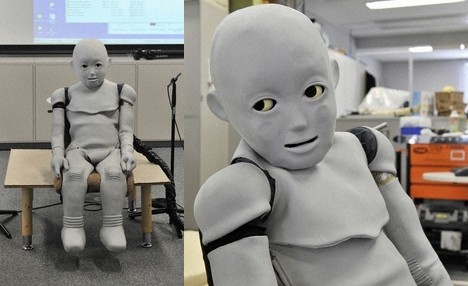
3. 大阪 JST
ERATO Asada のプロジェクトおよび大学は子
供大きさで分類された人間の特徴を
もつ呼ばれた CB2
( 生物測定ボディが付いている子供の
ロボット ) を造った。
それは 130 cm である。
高い、 33 の Kg の。重量を量り、 56 DOF を持っている。
それに目のためのカメラおよび耳の
ためのマイクロフォンがある。
それはまた持っている
シリコーンの皮で埋め込まれる 197 の接
触感知器。
人間の特徴をもつページ。 リンク 1;
リンク 2;
リンク 3;
ビデオ 1;
ビデオ 2;
ビデオ 3;


|
4. ロボットカブスの借款団(11のヨーロッパの組織)は非常に洗練された子供によって大きさで分類される人体ロボットによって電話されるRobotカブスを造った。
この人体ロボットに53 DOFがあり、高い104 cmを立てそして22のKgを重量を量る。 ヨーロッパを渡る11人の施設の40人以上この人体ロボットを開発した。
ここそしてここに2ビデオがある。


|
|
5. KITECH (産業技術の韓国の協会)はEveR-3と呼ばれる別のアンドロイドを導入した。 彼女は1.57 m高い(5' 2")
そして135ポンド(60のKg)の重量を量り、16の表情が可能がある。 彼女に彼女の上体で35 DOFがある。
(記事リンク) (記事リンク) (youtubeリンク) (youtubeリンク)


EveR-3 |
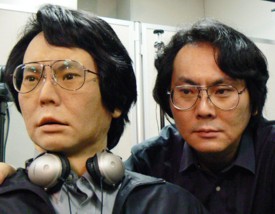
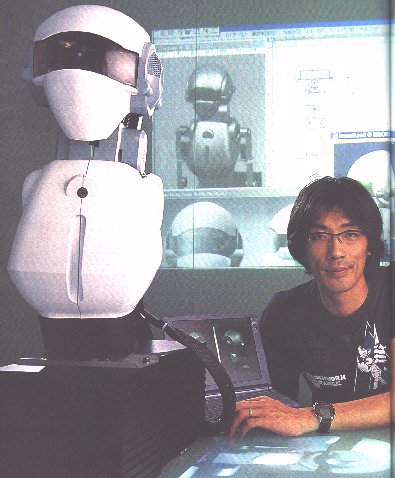
6a. 大阪大学のHiroshi Ishiguro
教授は彼自身から成っているdoppelganger
のロボットを持っていた。Ishiguro
はactroid (次に見なさい)
およびactroid DER および(上示されている)
actroid DER2
を造ったチームを導いている同じ教授である。このアンドロイドに46
の自由度がある。利用できる複数のビデオがここにある。もう一つのニュース項目はここにある。

6b. Doppelgangers
は普及しているなっている。ここに北京で最近握られた2006
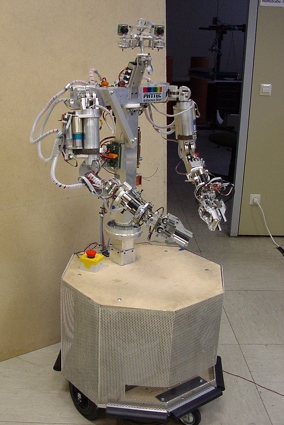
年の中国のロボット博覧会で示されていたZou
Renti の(l) 1 つはある。

|
|
7. 大阪University & Kokoro Inc. は名古屋、日本で今継続している 博覧会の 2005 年の世界の 市のためのRepliee Q1
と呼
ばれるActroid の人体ロボットの改善された版を作り出した。 彼女があなたに及びgentures 坐ると同時にRepliee
Q1 に人間ケイ素の皮及び一見が非常にある。このロボットに41 DOF がある(Actroid のための31 対) 。  < = Repliee Q1
< = Repliee Q1
|
8. KITECH のもう一人の韓国のグループはRepliee-Q1 のような非常にアンドロイドを作り出した。 それはEveR-1 と 呼ばれる。 それは高い約1.6m 、約50 キログラムを重量を量る。 産業技術、木曜日(5/4/06) の韓国の協会でBaeg 月
洪によって、上級研究員は女性の人間の特徴をもつのを離れて先頭に立たれたチーム覆いを、展覧会の間のEveR-1
と、ソウルの教育文化中心で示されて取った。ちょうど3,000,000,000 を使ったBaeg の1 年のEveR-1 の作成で(3.16M
米ドル) 勝った、年末頃までにモデル移動に4 本の肢をすることによって彼の日本の競争相手を超過するために見ている。


EveR - 1 KITECH
|
|
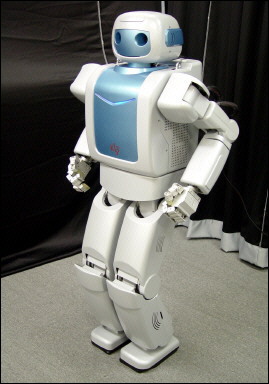
9.
Asimo の新しい人体ロボット ホンダはAsimo
の更新済人体ロボットを導入した。それに高い130 cm
54 をキログラム= 119 ポンド重量を量り、そして34 DOF
がある。ここに素晴らしいビデオはある。

|
10. 非常に人間の形をした人体ロボットがLe Trung (Brampton、カナダ)によって造ったAikoはここにある。彼女に現在10が彼女の指にある23
DOFがある。 未来以内に彼女に12がより多くのDOFある。 彼女は1.52 m高かったり、しかしまだ一人で立つことができない。
Trungにあるビデオがここにある。
1年だけのすばらしい仕事!


Aiko
with Trung |
|
11. Kokoro の夢及び大阪大学はモデル人間の特徴をもつ2003 年を11 月19 日東京の 国際的なロボット展覧会2003 年の発表した。このアンドロイドはActroid と 呼ばれ、
非常に現実的である。 Actroid の指定:
システムは3 つの別々の単位から成っている: 人体ロボットの部品: 高さ= 1.3m;
幅= 0.42m; 着席の長さ= 0.725m; 重量= 30 キログラム。 アンドロイドに31 DOF がある。 それは圧縮空気および電気(120w) を作動させる。 制御装置:
高さ= 0.6m; 幅= 0.75m; 長さ= 0.6m; 重量= 40 キログラム; 主要なコンピュータを含んでいる。 圧縮機の単位:
高さ= 1.37m; 幅= 0.9m; 長さ= 0.9m; パワー消費量= 3.7 キロワット;
騒音< 50 db 。
|
ここにActroid の 映画はある。 ここにActroid についてのもう一つの 記事はある。


友人
とのActroid
。 |
|
12.
中国は歌う人間の特徴をもつ呼ばれたDion
を導入した。それは上示されているActroid
程にほぼ高度の間、非常にリアルである。それは非常にwomanly
形のlife-sized
永続的なアンドロイドである。物語及びビデオはここにある。

|
13. 北京の科学の中国アカデミーのオートメーションの協会は2006
年8 月7 日にRong
チェンと呼ばれた新しい女性の人体ロボットを導入した。この人体ロボットは高い168
cm 、60
キログラムを重量を量る。第一次デザイナーはユェHongqiang
であり、$37,500
の費用でこの人体ロボットを造るために彼のチームは1
年を取った(300,000 Yuan) 。Rong
チェンは彼女が博物館のための受付係そしてツアー・ガイドである成都の四川科学博物館に送られる。(* 新しい*)
記事の
記事の
ビデオ (Quicktime)


|
| 14.KIST はちょうど Mahru-Z のロボット女中 (2010 年 )
を導入した。
それは 130 cm である。
高い、 55 の Kg の重量を量り、各手の 3
本の指を持っている。
それに 35 DOF がある。
リンク 1;
リンク 2;
リンク 3; ビデオ 1;
ビデオ 2;

 Z (right)
Z (right)
|
15.KIST は 2009 年に Mahru-R を導入した。
それは 145 cm である。
高い、 67 の Kg 。、および 35
DOF の重量を量り、各手の 3 本の指
を持ち、そして 2.6 Km 。 /hr. で歩く。
リンク 1; ビデオ 1;
ビデオ 2;

|
| 16.KIST は 2008 年に Mahru-M を導入した。
それは約 150 cm である。
高い、 62 の Kg の。重量を量り、
車輪で転がる。
おそらく約 20 DOF 。
リンク 1;
M (left)
 |
17.Choromet (HRP-2m) は豪華なおもちゃの人体ロ
ボットである。
それは 35 cm である。
高い、 1.5 Kg の。重量を量り、 20
DOF を持っている。
その費用は約 500,000 円 ($4,400) である。
Choromet はスタンドアップ式ひとりで
に横になり。
それはまた 1 本の足に立つことが
できる。
それはオペレーティングシステム
Linux を使用する。
Choromet は日本によって進められた産
業科学技術の協会 (AIST) および 4 人の
民間会社によって開発された。
リンク 1;
ビデオ 1;

|
| 18. E-nuvo は 126
cm である。
日本の技術協会が造る高い人体
ロボット。
それは 15 の Kg の。重量を量り、 21 DOF の合計を有する。
それはリチウムイオン電池力を
使用する。
リンク 1;
ビデオ 1;

|
19. 原子 7xp は最後の 8 年にわたる
FutureBots でダ
ンマチアスが開発する新しい人体
ロボット (2010 年 1 月 ) である。
それは 158 cm である。
高い、 73 の Kg の。重量を量り、 49
DOF を持っている ( 頭部のためのを含む
10 および手のための 10) 。

|
|
20. アラブ首長国連邦(アラブ首長国連邦) のPal の技術はREEM-A と呼ばれる非常に洗練された新しい人体ロボットを発表した。それに1.45 のm
を高い立て、41 キログラムを重量を量り、そして30 DOF が() ある自由度。指定はここにある。ある素晴らしいビデオがここにある。

|
21. Kawada は今HRP-3P
の人体ロボットを解放してしまった。このロボットは高い160
cm を立て、65
キログラムを重量を量る。それは合計36
の自由度を有する。Kawada
のHRP-3P のページはここに(日本語で当然)
ここにであるEngadget
からの記事ある。ここに素晴らしい映像の多くとの完全なHRP-3P
の指定はある。ここにAIST
の新聞発表はある。


|
|
22. 日本のTmsuk は彼らがKiyomori
と呼ぶ新しいロボットを作り出した。彼らにここのビデオとの彼らの自身のウェブサイトがある。Kiyomori
は武士の戦士として示される。Youtube
からのこのビデオは歩くそれを示す。

|
23. JVC はJ4
と呼ばれる新しく小さい人体ロボットのロボットを解放した。それは高い20
cm を立て、が、0.77
キログラムしか重量を量らない26
の自由度を有する。ここにPlyojump
からの素晴らしい提示はある。


|
|
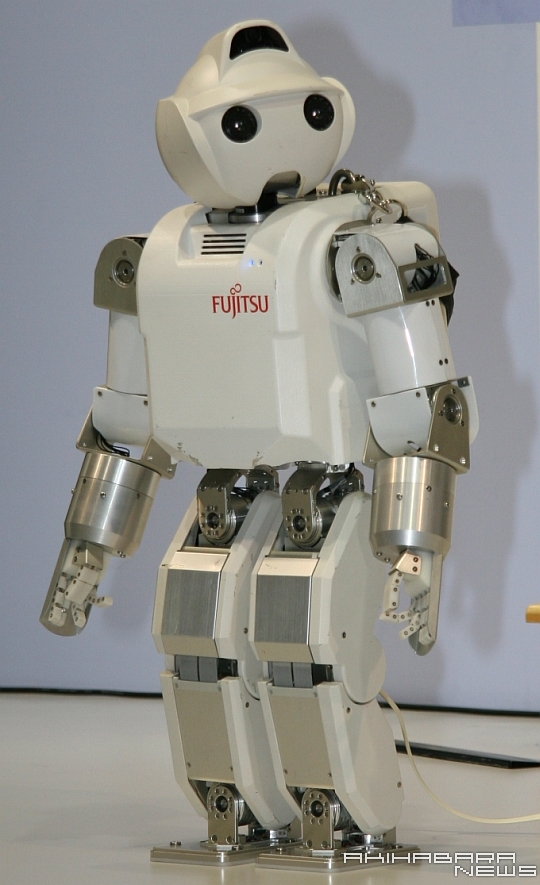
24. 冨士通は今HOAP-3
を解放してしまった。この小さい人体ロボットは高い60
cm を立て、9
キログラムを重量を量る。ここに1
つの記事はある。この人体ロボットに28
の自由度があり、1.1
ギガヘルツのペンティアムプロセッサー連続したRT
Linux を使用する。


|
25. イギリスのグループはRobothespianと呼ばれる実行ロボットを作り出した。
このプロジェクトは2005年の1月に始まった。 Robothespianに約30 DOFが、立て、高い175 cmを(18
cmの立場と)重量を量る33のKgをある。 このロボット俳優は55,000ポンド(US$ 85,000、または7.9M円)のために今利用できる。
ここそしてここに2ビデオがある。

 |
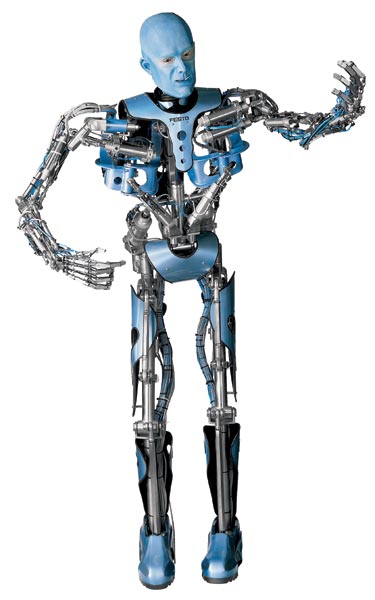
| 26. Fesco の気体力学の専門家は、巨大な 人間の特徴をもつ呼ばれたTron X を造った。 このアンドロイドは約2.8 のm (9 フィート) を高い立て、約300 キログラム(660 ポンド) を重量を量る。 それはすべての異なったサイズの 200 本の 空気シリンダーに作動する。 Aparently は1997 年にオーストラリアでこのアンドロイド造られた。 多分現在のモデルは第2 版か。であるか。


Tron-X - 200+ DOF
|
27 。会社はソフィア 、ブルガリアにいたKibertron Inc を持っているKibertron と呼ばれたフル・スケールの人体ロボットのプロジェクトを 呼んだ。 人体ロボットはターミネーターのように見える。それは高い1.75m (5 ' 9") 、90 キログラム(200 ポンド) を重量を量る。 それらに23 のスタッフがある。 たくさんあるKibertron に82 DOF ある。 手に20 DOF があり、それぞれ腕に8 が各腕及び手のための28 の合計のためのより多くのDOF ある。
ここにプロジェクトの輪郭はある。


前部及び背部 腕及び手
|
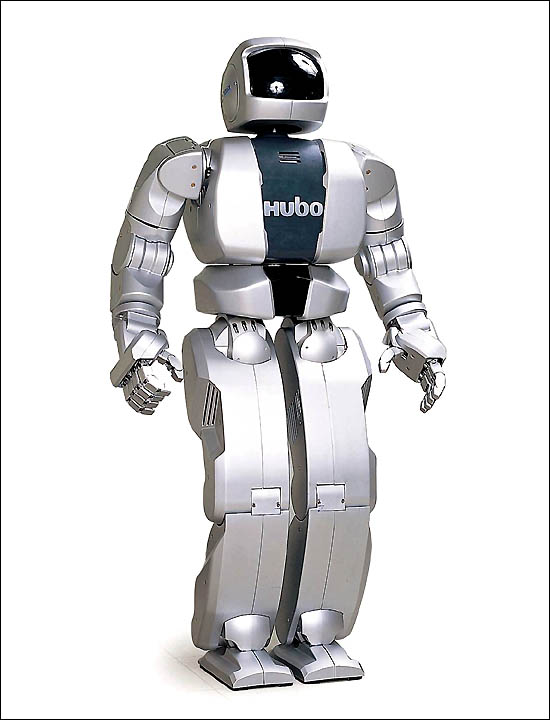
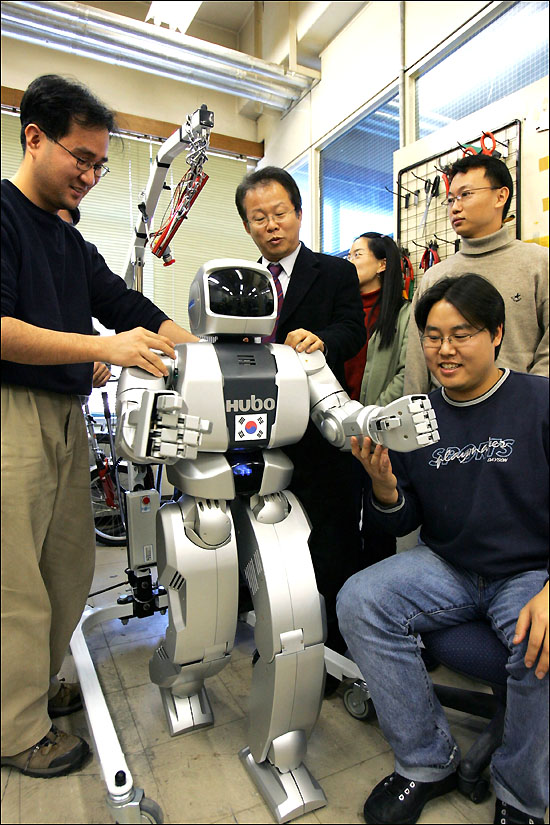
| 28 。 KAIST は 2005 年1 月6 日のHUBO と呼ぶ新しい人体ロボットを 発
表した。 プロジェクト・リーダーはまた年の"KAISTian" と名前が挙げられた教授である6 月ho オハイオ州。
人体ロボットに41 DOF が、立て、高い1.25m を(49") 重量を量る約55 キログラム(121 ポンド) をある。
アンドロイドは歩き、話し、スピーチを理解できる。 このロボットは1.25 km/hr
の率で歩く。はっきり韓国は世界の人体ロボットの開発の競争で伝染性である。 このグループはDaejeon 、韓国 にいる。


Hubo
の
歩くこと
Hubo は(ASIMO がことができない一方) 彼の指を独自に動かすことができる。ここにより多くの記事カップルはある: Chosun のニュース 及び Theautochannel。
|
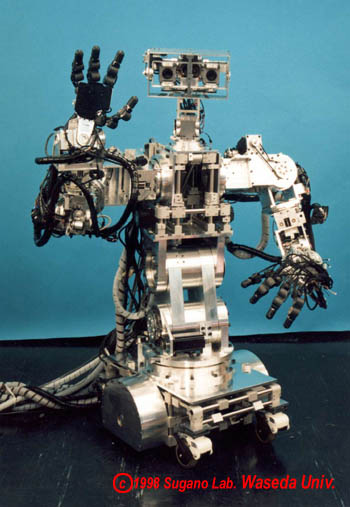
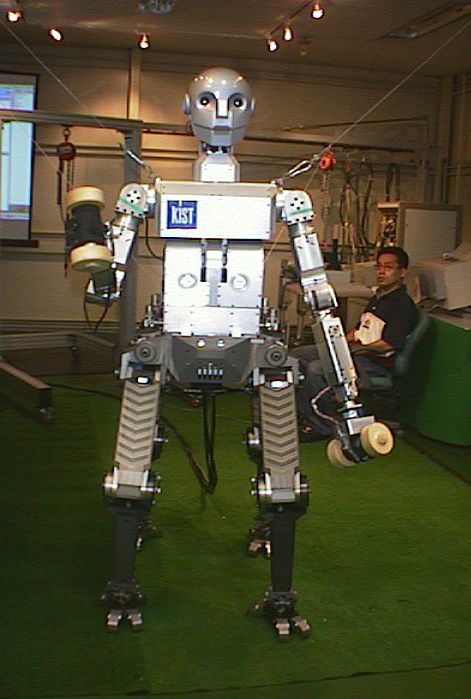
29. KIST はMahru (男性) 及びAhru (女性)
と呼ばれる2
つの人体ロボットを。造った。開発チームはBum-Jae
Jae
によって鉛行う。このグループは人体ロボットをである世界の最初ネットワークベースの人体ロボット要求する。それは人間のように考え、人間のように学ぶ。
それは高い約1.5m を(60")
立て、約67 キログラム(147
ポンド)
を重量を量る。それは歩き、話し、スピーチを理解できる。それは0.9
km/hr で歩く。それは35
の自由度を有する。チームは2009
年に解放されるMahru II
に今取り組んでいる。


Mahru
Mahru II
|
| 30 。 2001 年9 月10 日冨士通の実験室株式会社はおもちゃ人間の特徴をもつ呼ばれたHOAP-1 発表したの 20 の自由度の18"高い13 ポンドのアンドロイドを。費用は$41,000か4.8,000,000 円である。 今彼らは HOAP-2 と呼ばれる別のアンドロイドを発表してしまった。 そのほぼ同じ位のサイズ。


HOAP-1 HOAP-2
|
31 。2003 年9 月19 日にソニーはQRIO と呼ばれた 別の小さい人体ロボットを発表した。 SDR-4X にそのかなり類似した。 それはよりよく歩き、落下からよりよく回復できる。
 QRIO
QRIO
|
| 32 。 ソニーはRobodex
2002 年のためのSDR-4X を導入した 。HOAP-1 と競う大きく新しいアンドロイド。 映画。 多くの映像。 記事及びより多くの映像。 
|
33. Kawada Industries Inc. はRobodex 2002 年 のための HRP-2P を導入した。
この人体ロボットは非常に印象的ようである。それに高い154 cm (60") 重量を量り、58kg (127 ポンド) のある30 DOF がである。ここに 新聞発表はある (日本語で) 。電池のパックの欠乏に気づきなさい。 ここにHRP2 についての 新しい物語はある。 行為のHRP-2 のあるビデオへ新しいリンクがある。
 
|
|
34. Simroid と呼ばれる歯科訓練のロボットはロボットを開発するためにKokoro Co. で技術者と協力した東京の日本歯科大学の先生によってNaotake
Shibui 、導入された。それはトレイニーが間違いを作るとき苦痛の非常に人間および均一な悲鳴に見る。
 Simroid
Simroid |
35. トヨタMotor Company
は今バイオリンを演奏することができる人体ロボットを導入してしまった。これは指の手際よさで改善を示す。このロボットは1.52 のm を高い立て、腕および手で17
の接合箇所がある。Elgar によって"盛儀盛宴を# 5" するロボットのビデオはここにある。

|
| 36. トヨタMotor Company は 長い待たれた続き の 2004 年3 月11 日 東京のにアンドロイドを発表した。 彼らは(これ及び次の記入項目3 つで示されている) 4 つのモデルを計画する パートナーのロボットと呼ばれ、人間のための個人的な助手として作用するように設計されている。 最初の1 つは 歩く版である。このアンドロイドは高い1.2m (4') 、35 キログラム(77 ポンド) を重量を量る。 年配者を助けることを意図する。

日本のページ
|
37 。トヨタは来年起こるかどれが全体的なハーモニーの 博覧会 2005 年の展覧会でアンドロイドをはじめて示すことを計画する(2005 年3 月25 日から2005 年9 月25 日Aichi 、日本のへの。 第2 モデルは 圧延版である。この人体ロボットに車輪で転がるが、人間見る上体がある。 それは製造業の為に意図されている。 それは高い1m (40") 、また35 キログラム(77 ポンド) を重量を量る。

日本のページ
|
| 38 。 トヨタの第3 モデルは グループの最も珍しいロボット容易にである。 このモデルは取付け可能な 版と呼ばれる。 歩くことができる 椅子の
は基本にである! ワウ! なんと概念か! それは1.8 のm (6') を高い立て、75
キログラム(165 ポンド) を重量を量る。椅子の人が安全ヘルメットを身に着けていることに気づきなさい。 1
つはヘルメットが必要でないことを望む。 
日本のページ
|
39 。トヨタによって作り出される第4 モデルはワイヤー作動させた 版である。 データはサイズか重量について与えられなかった。 それは他より軽く、すぐに動くことができる。 トヨタに場所の行為でロボットの映画がある。

日本のページ
|
| 40 。 ARNE 及びARNEA と呼ばれた2 つの新しい人体ロボットは2003 年8
月5 日ロシアの発表された。
それらはセント・ピーターズバーグの工芸学校大学からのNew Era
及び学生呼ばれたセント・ピーターズバーグの会社によって造られた。これらの人体ロボットは1.23 のm
(4') を高い立て、61 キログラム(134 ポンド) を重量を量る。それらに28 DOF がある。
プロジェクト、新しい時代のロボット技術的なセクターのアレキサンダーYakovlev による鉛はずっと2
年間、動いている。 
|
41 。川崎重工業の高度の産業科学および技術("AIST" ) のTokyu の構造Co. 、株式会社、国民の協会、およびホンダにHRP-1S と呼ばれる新しいプロジェクトが ある。 人体ロボットはホンダによって造られ、制御ソフトウエアはAIST によって開発された。 この記事はバックホウを作動させる人体ロボットを示す。私達は人体ロボットにホンダのAsimo かP3 とDOF の同じ数があることを仮定する。

|
| 42. 北京の技術協会にBHR-2
と呼ばれる別の人体ロボットのプロジェクトが今ある。この人体ロボットは"Huitong"
と、子供呼ばれる。それは高い160
cm 、約63
キログラムを重量を量る。少しは他の情報解放されたが、私達はで持ち、少なくとも32
DOF をBHR-1
を開発した同じグループによっておそらく成長した仮定する。
 BHR-2
BHR-2
|
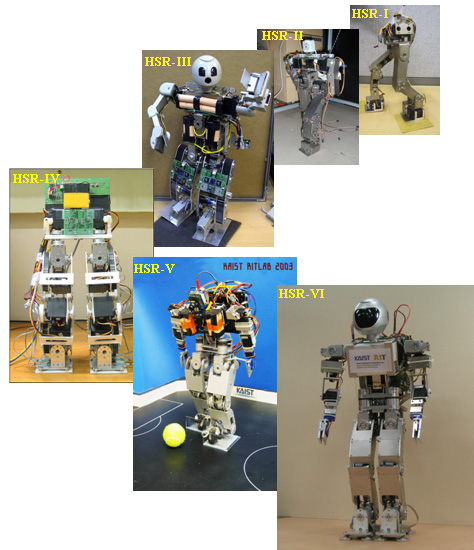
43. KAIST にRIT (ロボット知性の技術)
の実験室でDaejeon
、韓国で別の主要な人体ロボットの開発努力がある。プロジェクト・リーダーは教授であるJong-Hwan
金。彼らに約15
人がプロジェクトに取り組むことをあり、HSR-VI
また呼ばれたHanSaRam
はであるかどれの一連の6
台か7
台の人体ロボットのロボットを最新造った。それに25
DOF が12 のDC
モーターおよび13
のサーボモーターから成っていることをある。
 HSR
HSR
|
| 44 。 北京の技術協会に BHR-1 と呼ばれる 大きい人体ロボットのプロジェクトがあ
る。このアンドロイドは1.58 のm (5 ' 2") 高く、76 キログラム(167 ポンド) を重量を量る。それに32 DOF
がある。それは33 のcm のステップの1 km/hr で歩くことができる。プロジェクト・リーダーはスタッフがQiang
黄を含んでいる教授である李Kejie.Other 、Yuechao Wang 、分tan 、Tianmiao Wang およびJinsong
Wang 。 このアンドロイドはまた上示されている日本のアンドロイドの複数に類似した非常に高度のようで。  BHR-1
BHR-1
|
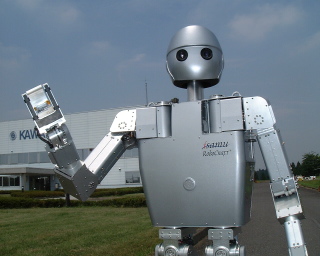
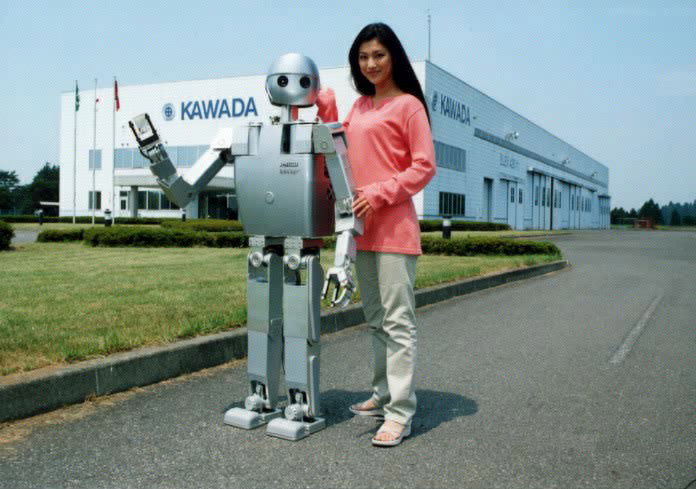
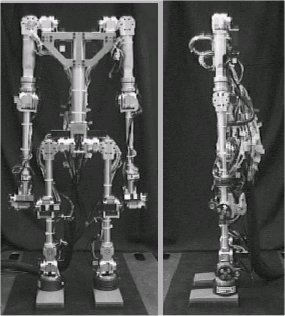
45 。Kawada の 企業株式会社の航空機及び機械システムの部分。東京のUniv のためのH7 アンドロイドを造った。それらは今H6 及びH7 からの同じ技術の一部を使用して専有物のプロジェクトを始めてしまった。その呼ばれた Isamu。 

Isamu は 1.5 のm (5') 高くおよび幅6 m 、約55 キログラム(121 ポンド) を重量を量る。 それに32 DOF があり、頭部がH6 かH7 より人間の形をしていることを見ることができる。
|
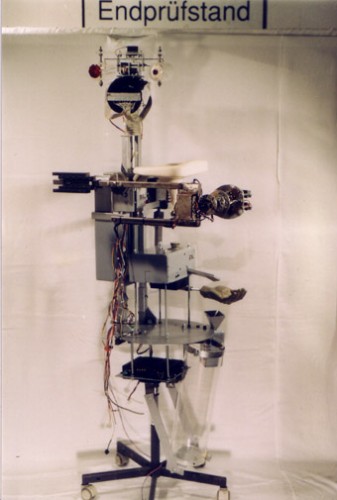
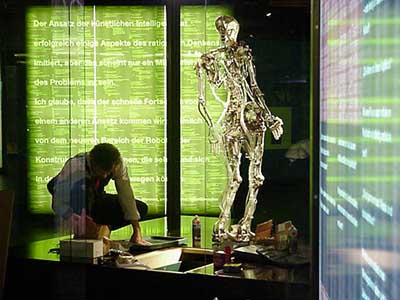
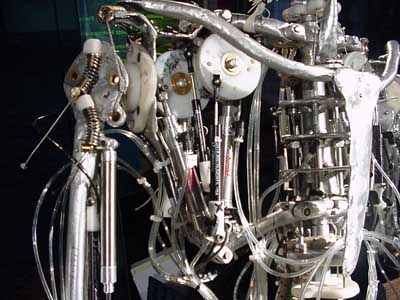
| 46.
筋肉および骨組が私達の人間の
骨組および筋肉の後で模倣され
ること ECCE のロボット ( 迎合的に設
計されたロボットの具体化され
た認知 ) は珍しい人体ロボットで
ある。
それはを含む大学の借款団によ
って造られた
Essex の大学、サセックスの大学、チ
ューリッヒの大学、ベオグラード
の大学、ミュンヘンの大学、および ロボットスタジオ
。
それはクロノプロジェクトのスピ
ン・オフである。
それに 80 DOF がある。
それは 2009 年 8 月 11 日導入された。
ビデオ 1;
ビデオ 2;

|
47.Kawada の企業は 2009 年 11 月 19 日に
NEXTAGE の組み
立てロボットを導入した。
それはとてもよく大きく設計され
、見る。
それに 15 DOF があり、 1.5
Kg のペイロードを持ち上げることが
できる。 ビデオ
1; ビデオ 2;


|
48. テヘラン(イラン)の大学はSurena-2と呼ばれる素晴らしいロボットを導入した。 このロボットはこのリストの多数のロボットのように見える。
それは1.45 m高く、45のKgを重量を量る。 それに22 DOF (12、8、および頭部の手の足の2)がある。 このロボットは8だけがDOFあった非常に原始Surena-1に続く。
Surena-2は完了するための努力の10,000の延べ時間を引き継いだ。
(記事リンク) (記事リンク) (記事リンク) (記事リンク)
 Surena II
Surena II
|
|
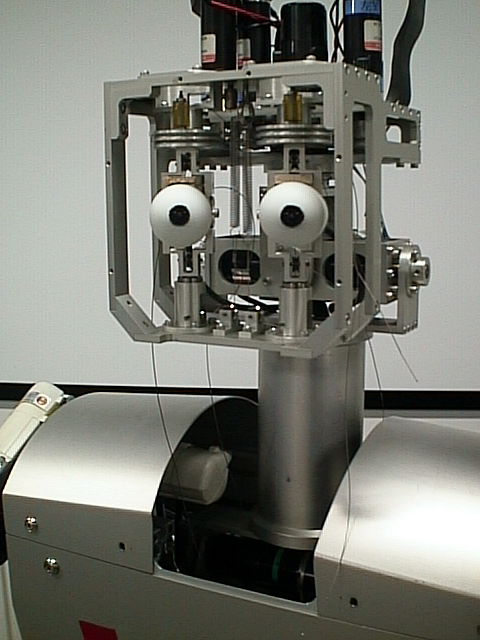
| 49 。Kitano の共生システム (東
京、日本) 日本Science 及びTechnology Corp の子会社(のHiroaki Kitano
はである日本の政府によって次々と造っている彼がSIG (共生の知性のグループ) と呼ぶアンドロイドを資金を供給される左の記入項目を見る- #
11) 。ショーのSIG 及びTatsuya Matsui の下の写真。 Kitano
は人間の特徴をもつ建築者の世界に挑戦した。 彼は彼のアンドロイドが原型である信じる。
私達はそれについて見る。プロジェクトを結合するためにところで 、それらは 人々を捜している。  
Matsui サン 及びSIG
|
50 。Kitano の共生システム (東
京、日本) 日本Science 及び日本の政府のHiroaki Kitano はによって次々と資金を供給されるTechnology Corp
の子会社であるPino と呼ばれる人間の特徴をもつ赤ん坊を造っている。Pino に29 のモーターがあり、高い約75 cm (30")
を立て、そして8 キログラムを重量を量る。ここに リンクはタイム誌の記事にある。私が 最近見つけた Pino 新しいリンク
。 ワウ! Kitano は今Pino のために使用された離れたソフトウェア及びハードウェア設計を与えている。 ちょうどここに 行き、 署名しなさい。
 Pino - 8KB
Pino - 8KB
SIG はリンクを設計する
PINO の設計リンク。 |
| 51。Kitano に今もう一人の小さい人間の特徴をもつ呼ばれたMorph3 が ある。 それに高い38 cm (約15 インチ) 、30 DOF があり、そして約2.4 をキログラム= 5.3 ポンド重量を量る。それはまたBluetooth コミュニケーションを使用している。
 
Morph3
|
52 。早く2001 年の10 月に、 Kitano の共生システムは" 呼ばれた別のプロジェクトを変形させる" 発表した。 命令をアンドロイド に渡し、 主要なコンピュータにアンドロイドからフィードバックを送返す使用をBluetooth の無線通信プロトコル変形させなさい。 ここにもう一つの記事はある。 村田はこのプロジェクトのco-developer である。 持ち、26 DOF を立てる高い約13.6"(35cm) を変形させなさい。 私の最もよい源、Gianluca は私に映像との あるリンクを送った。  
|
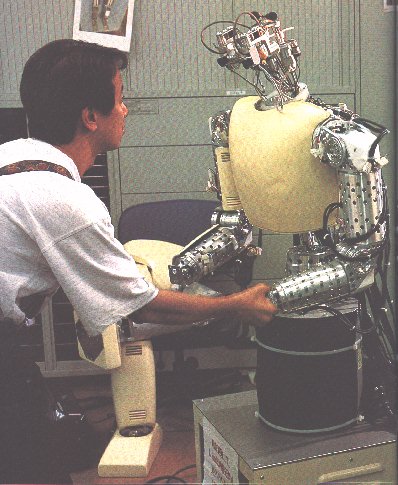
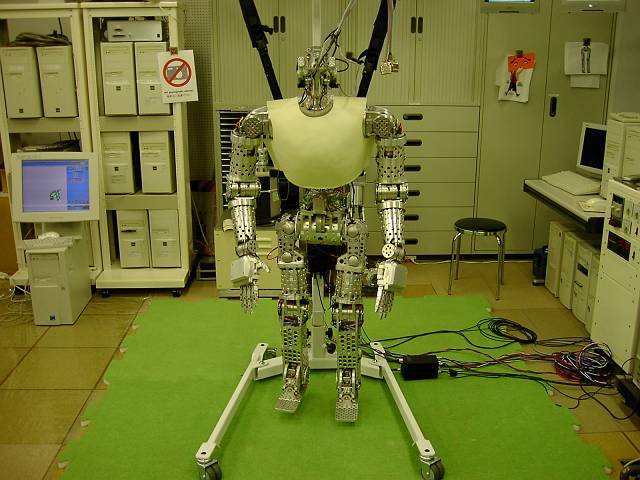
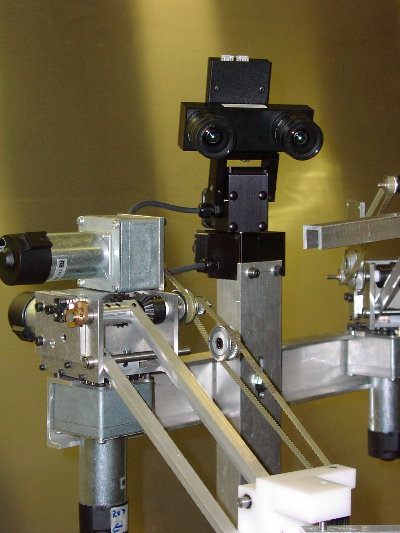
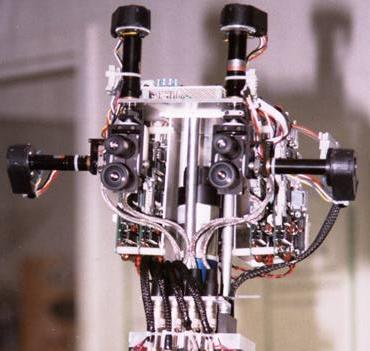
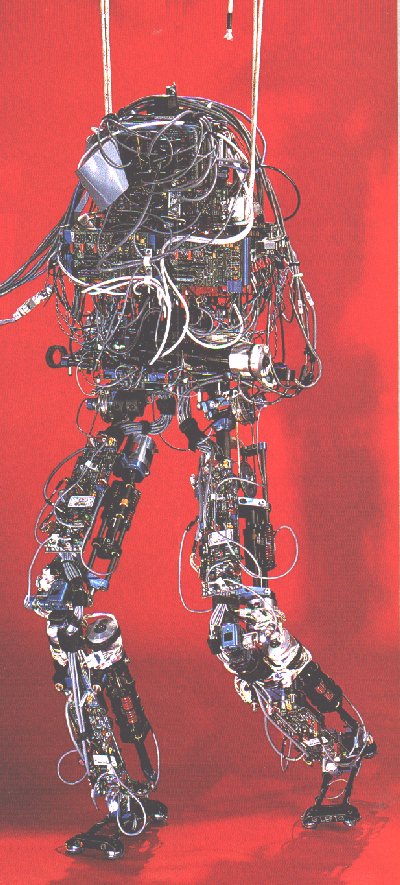
| 53. 筑波 、日本 の電気工学の実験室は教 授のYasuo Kuniyoshi
方向の下で人体ロボットの相互作用の実験室で人体ロボットを造っている。人体ロボットはジャックと呼ばれる、
アンドロイドは$1,000,000 上の方法を- まだ終わらない酒造機要し。 ジャックはまたこの月のアンドロイドについてのワイヤーで縛られた 雑誌の記事 で特色になった。(2000 年の252 - 272 pgs 9 月) 。 足は背景の公正なやっと目に見える。 Gordon チェンは素晴らしい記事にちょうど私に"ジャック" の別の 映像およびリンクを送った。ジャックに46 DOF がある。  
|
54. Tohoku 大学に今"Saika3" と呼ばれる別のプロジェクトがある。このアンドロイドはホンダのアンドロイドのようなalot を見る。それは高い1.27m 及び幅5 m 、47Kg を重量を量る。 Saika3 に
30 DOF がある 
Saika-3 グループ
|
55 。 東京大学の Jouhou システムKougaku 実験室にH7 と 呼ばれる新しいプロジェクトがある。 H6 にその別のbiped 類似した。 別のH7 リンク。(< = 新しいリンク)


H7 はH6 にサイズ及び機能で非常に類似しているはっきり。上記の写真がとられたKawada の企業空港で歩くそれらはH7 の18Meg ビデオを有する。 |
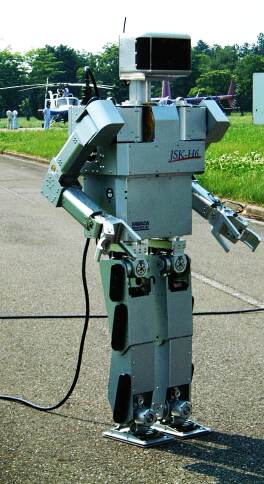
56. 東京大学の Jouhou システムKougaku 実験室にH6 と 呼ばれるプロジェクトがある。 H5 にその類似した。  
H6 は59 m (23") について1.37 のm (4'6") 高く、広く、55 キログラム(121 ポンド) を重量を量る。それに35 DOF がある。
注: Saika 及びH5 は歴史的人間の特徴をもつプロジェクトのページ に 動いた。 |
| |
|
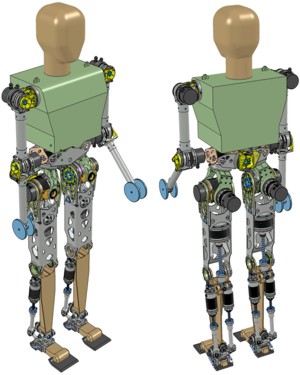
| 57 。今ではミュンヘン(TUM)
の技術的な大学に第2 主要なプロジェクトが- 呼ばれたLOLA ある。上体に2 があり、各腕に 4 があるがこの人体ロボットに22 積極的に運転されたDOF が足7 DoFs があるのをそれぞれある。
 LOLA
LOLA
|
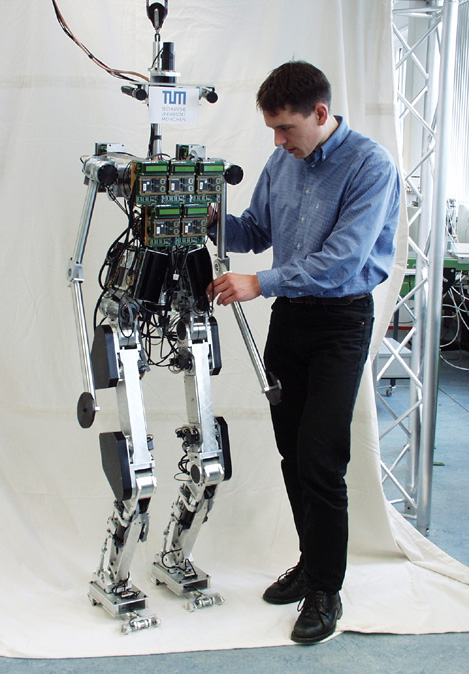
58 。ミュンヘン(TUM) の技術的な大学で応用機械工のための協会で継続する大きい人間の特徴をもつプロジェクトがある。
アンドロイドは"Johnnie" と呼ばれ、 既に歩くことができる。それらは今それを動かせる試みている。これはミュンヘンに2 つの主要なプロジェクトがあることを意味する。Johnnie は公平なHannover に表示に今年の春だった。それらは場所の2 ビデオを有する。 
|
| 59。 東京のWaseda大学でSuganoの実験室からのTwendyOneと呼ばれるもう一つのプロジェクトはここにある。この人体ロボットの大きい前進は接触感知器を備えている指を搭載する非常に洗練された手である。
人体ロボットに47 DOFがあり、1.47 mを高い立て、そして111のKgを重量を量る。
それらは幾つかの映画をここに有する。

Twendy One |
|
| 60. 私は先生からDavut Akdas電子メールを受け取った。 彼は北東トルコのBalikesir大学でトルコで最初の人体ロボットを造った。
彼の人体ロボットはRoboTurkと呼ばれる。 それは足で12 DOF、ボディの5 DOFおよび腕の2 DOFを含んで23 DOFの合計を有する。
重量は55のKgであり、高さは150 cmである。 彼の人体ロボットは先、後方、そして横に歩くことができる。 それは小さいステップに上ることができる。 ワウ!
すばらしい仕事!


|
61 。彼の学生の教授はGordon Wyeth 及び複数ブリスベーン、オーストラリアで
クイーンズランド の大学でGuRoo と(大きくUnderfunded Roo のために)、呼ばれるプロジェクトを始めた。 GuRoo に 23 の自由度があり、
1.2 のm を高い立てる。その写し出された重量は日本の最近のRobocup 2002 年に30kg. Guroo 加わったである。 チームに 6 人がある。チーム・メンバーの1 つは、Damien Kee 、 最初一時的なステップを踏んでいる彼らのアンドロイドのあるビデオを掲示した。端正!

|
| 62. 人体ロボットのロボットを造るために日本
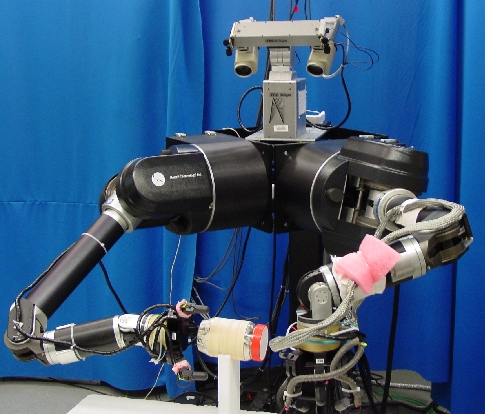
Science 及びTechnology Corp (京都、 日本) は最近5 年のプロジェクトを明らかにしてしまった。このプロジェクトは1996 年の10 月に始まった。プロジェクト・リーダーは先生であり、Mitsuo Kawato それらに約18 のスタッフがある。人体ロボットのロボットはDB と
呼ばれる (次に見なさい) 。
 32KB イメージ
32KB イメージ
|
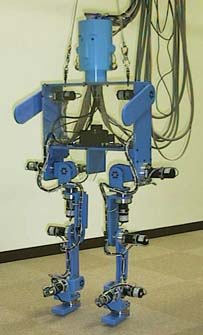
63. Darmstadt
の技術的な大学に人体ロボットのプロジェクトが実施中に今ある。人体ロボットはLara
と呼ばれる。それに高い130
cm 、38 のNitinol
ワイヤー筋肉から成っている18
DOF
がある。チームリーダーは教授であり、Oskar
フォンStryk 彼らに約15
人の学生がプロジェクトに取り組むことをある。
 Lara
Lara
|
| 64. 影のプロジェクト (ロンドン、イギリス) はこのグループ人体ロボットの bipedal 歩行機械を発達させている。 それらにまた販売のための複数のプロダクトがある。 スタッフは 約14 人を含んでいる。次にbipedal 歩行者のイメージがある。
 208K
208K |
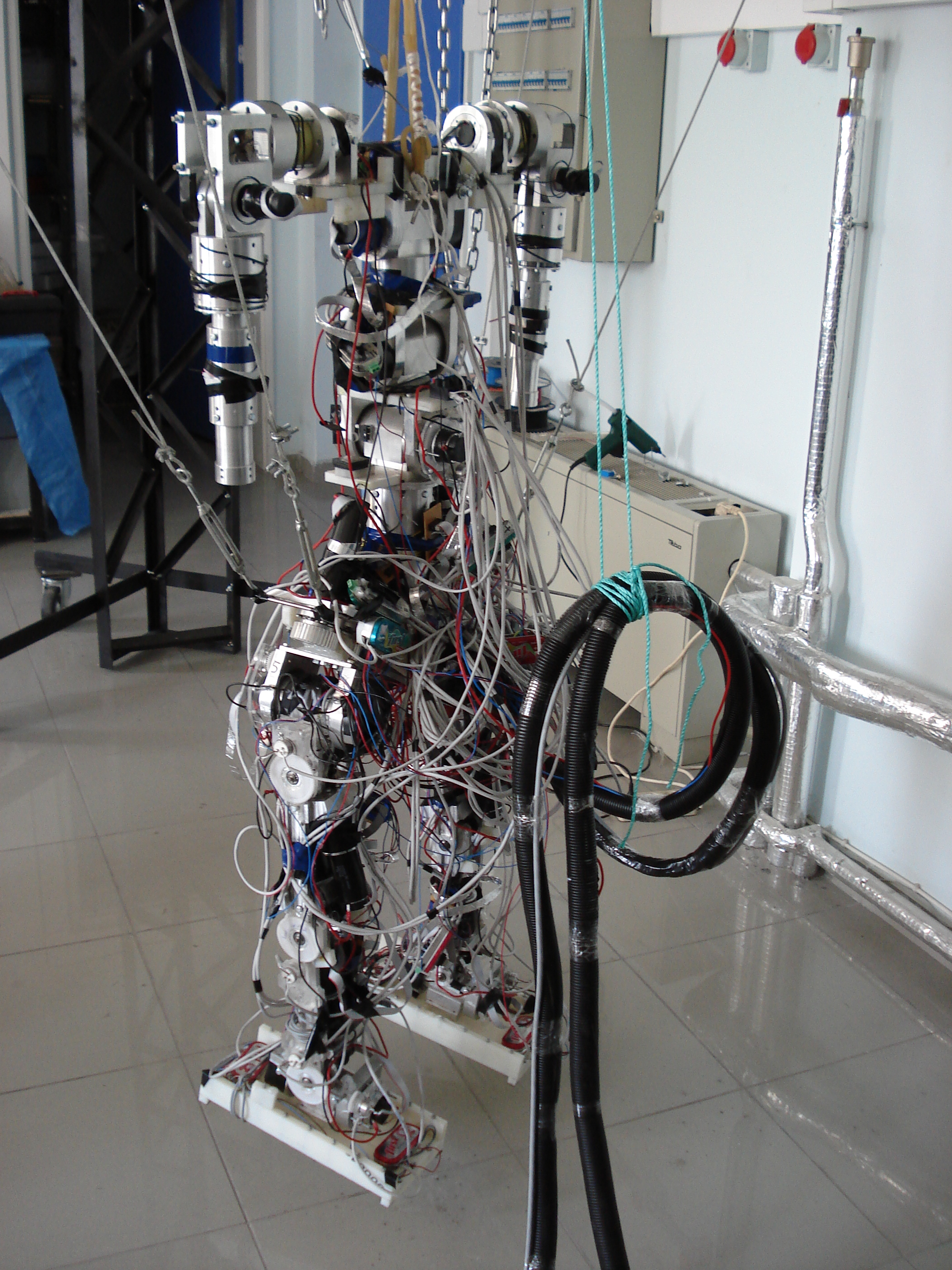
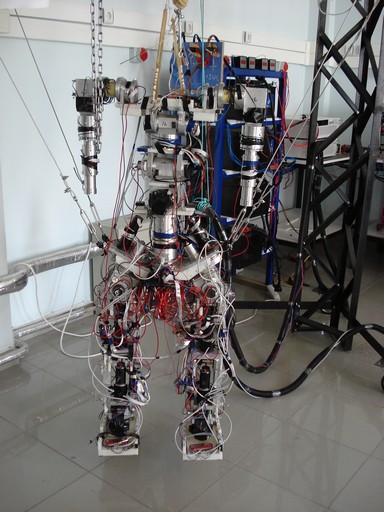
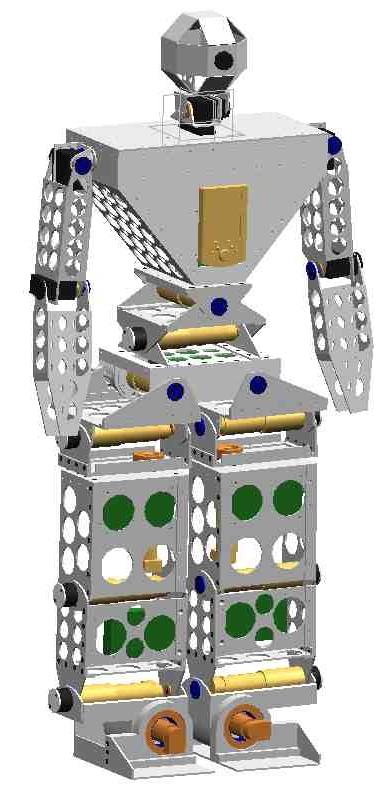
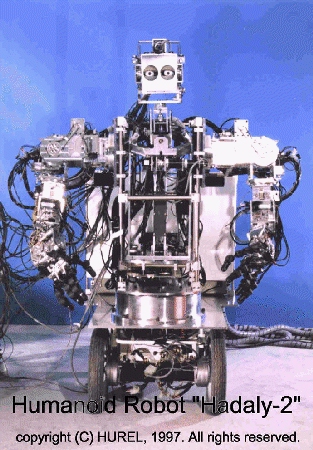
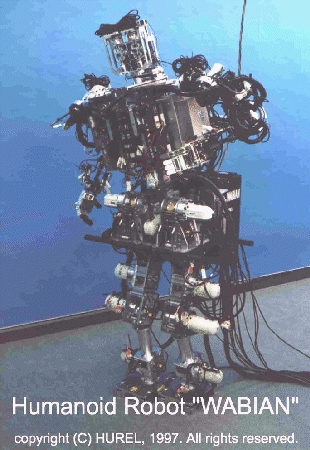
65. Waseda 大学人体ロボットのプロジェクト
(東京、日本) はアンドロイド約6 フィート高く、600 ポンドに重量を量る。 それは、
ちょうどやっと歩くことができる。このアンドロイドおよびホンダのアンドロイドは両方1998 年3 月の3 回を乾燥した"上がる"
とロボット呼ばれたPBS プログラムで特色になった。Waseda の人体ロボットのプロジェクトは6 グループで構成される:
次にHadalay-2 及びWabian のイメージがある。


|
| 66. 東京(AIST) の高度の産業科学そして技術の国民の協会は東京の筑波科学都市北の8 を含む日本中の15 人の研究所を支える。彼らは1998 年 に 始まった人体ロボットのプロジェクトを後援している。彼らは実際に多数の プロジェクトを有する。 

私達はの上で権利のP3 が歩くことを学ぶHRP の足であることを見。
|
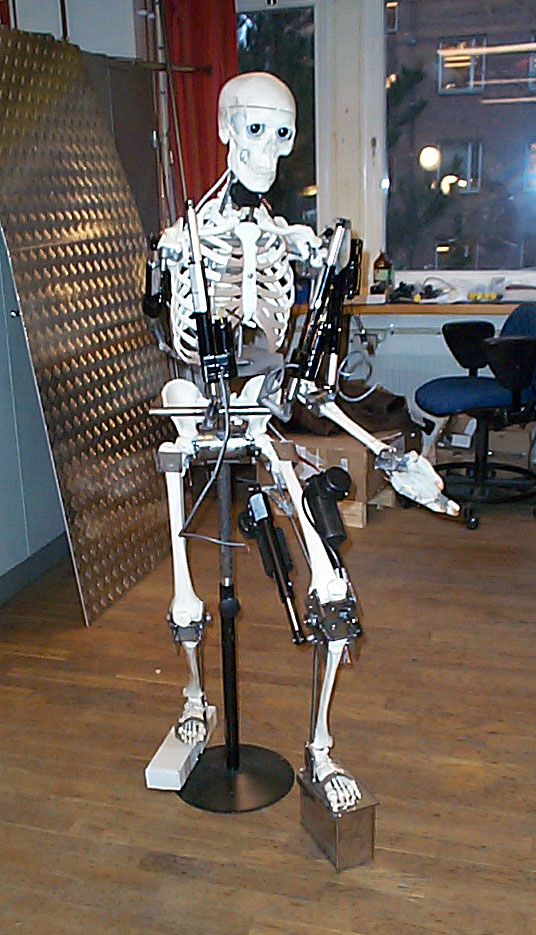
67 。 Chalmers 大学に また2000 年の夏に 始まったPriscilla と呼ばれるフル・スケールの人間の特徴をもつプロジェクトがある。彼女は人間の完全な大きさで分類された骨組に基づいている。彼女は水圧シリンダによって動力を与えられる。 彼女が双眼視を有することを見ることができる。  Priscilla 。
Priscilla 。
|
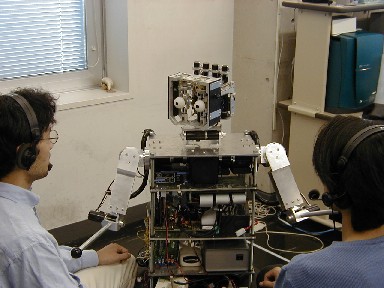
| 68 。東京 の大学に Telesar2 と呼ばれる大きいプロジェクトが ある。
そ
れは2 つの主要なシステムから成っている: 1 。腕及び頭部が付いている人間の形をした上体は回転タワーに取付けた。
そして2) 複数のモニターがあるおよび人間オペレータが彼/彼女の手で身に着けている2 つの手制御制御システム。
これはかなり独特なようである。 手は非常に良質のようである。 プロジェクトは東京のUniv
に情報科学及び技術の大学院のTachi の実験室の先生によってTadakuma 鉛行う。 それらは場所のビデオの多くを有する。 それらはAICHI 、6 月9 日からの2005 年6 月19 日への日本の世界の博覧会2005 年でシステムを表わした
 Telesar 2 。
Telesar 2 。


|
69. Teajon のKAIST の 機械制御の実験室、韓国にKAIST の人体ロボットのロボット(KHR-1 ) と呼ばれる別の人体ロボットのプロジェクトがある。このプロジェクトは2002 年の1 月に始まり、今教授を 含まれている6 月Ho オハイオ州及び12 人の学生。KHR-1 は1.2 のm を高い立て、48 キログラムを重量を量る。 それに21 DOF があり、歩くことができる。 場所にビデオがある。


|
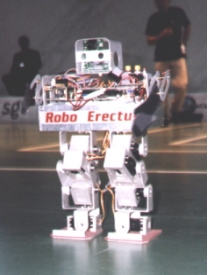
| 70. 人体ロボットをする建物のサッカーであるかどれをで電気及び電子工学、シンガポールの工芸学校の学校のARICC (高度の ロボット工学および インテリジェント制御の中心) に主要な人体ロボットのプロジェクトが行くことをある。それらはRobo-Erectus をIII と呼ばれるかどれがの複数の人体ロボット、最新を造った。 それに高い50 cm を立て、22 DOF がある。プロジェクトは約15 人の メンバーが含まれ、 教授によってChangjiu Zhou 鉛行う。 

|
71. 帝国大学ロンドンに2 つの 人体ロボットのプロジェクトがある。 それらはコグ- 呼ばれたLudwig と同じような人体ロボットのupper-half を 有
する。 それらにまたフリップ及びフロップと呼ばれる高い約14"を立てる2 つの小さい人体ロボットがある。
それらはLudwig の映画を有する。第一次建築者は次のとおりである: Murray Shanahan 、Yiannis Demiris
、デーブRandell 、および印Witkowski 。


Ludwig
の
フリップ及びフロップ |
| 72. Tohoku 大学にまたbipedal 歩
くロボットプロジェクトが ある。 このプロジェクトはEmura の実験室に教授のTakashi Emura 方向の下にある。
彼らに4 人の教授および約20 人の学生がある。目的は人間タイプ自律ロボットを造ることである。
それらは少なくともずっと1 年間プロジェクトに取り組んでいる。次にbipedal
歩行者のイメージ- Marilyn モンローの後の呼ばれたモンローがある。  17KB イメージ
17KB イメージ
|
73. Politecnico の ディディミアムTorino に 主要な人体ロボットのプロジェクトがある。 それはIsaac と 呼ばれる。
リーダーは教授であり、Guiseppe Menga 7 人の学生はまたプロジェクトに取り組んでいる。 Isaac は高い約61
cm (24 インチ) 、約7 キログラム(15 ポンド) を16 DOF が重量を量るある及びPC104
によって運転される。人体ロボットはRobocup 2003 年の第2 場所に勝った。  Isaac 及びチーム。
Isaac 及びチーム。 |
| 74. 中国のアンドロイドは2000 年12 月1 日発表された。
このアンドロイドは1.4 メートル(55 インチ) 高く、20kg (44 ポンド) を重量を量る。それは長沙、Hunan
、中国で国防のための中国の科学及び技術大学で造られた。Aparently それらは1990
年に別のアンドロイドの背部を造った。彼らは"開拓者" が複数の言語で歩き、話すことができることを言う。細部については記事の上で見なさい。  開拓者(14KB)
開拓者(14KB) |
75. Goteburg のChalmers 大学、スウェーデンに 3 つのプロジェクトが今ある。彼らに 第2 プロトタイプ を今使っている、および新しく小さい歩く人間の特徴をもつ呼ばれたElvina があるElvis の プロジェクト。 スタッフは 約13 である。 

Elvis #2
Elvina |
| 76. マサチューセッツ工科大学- コグのプロジェクト
ケンブリッジの固まり、米国は このプロジェクト人体ロボットを開発しているも。 人体ロボットに4 つの目(2 及び間隔のための上り終わりのための2)
、2 本の腕および胴を搭載する頭部があるが、足をまだ有していない。彼らに2
人の 教授および約7 人の学生がある。 それらはまた約10 人の卒業生を要求する。プロジェクト・リーダーはRodney の小川及びリンステインである。コグの最もよいpix の一部はRodney の小川の ホームページにある。次に頭部のコグそしてクローズアップのイメージがある(4 つの目と) 。 

|
76b. MIT の足の実験室は コグの胴にすぐに結婚しているように意図されている一組の足を造った。M2 のプロジェクトと呼ばれる足はこの月のアンドロイドについてのワイヤーで縛られた 雑誌の記事で 特色になる。(2000 年の252 - 272 pgs 9 月) 。  111KB
111KB |
| 77. MIT にCoco と呼ばれる新しいプロジェクトが ある。小さいまたは多分赤ん坊のゴリラであることを仮定する。それに15 DOF があり、約20 ポンドを重量を量る。ココヤシは 約12"(30 cm) の正方形である。 
|
78. 横浜国民大学にbipedal 歩くロボットプロジェクトが
あるも。このプロジェクトはKawamura の実験室に教授のAtsuo Kawamura 方向の下にある。彼らは少なくとも5 人の 職員を有する。目的は人間タイプ自律ロボットを造ることである。 それらは少なくともずっと1 年間プロジェクトに取り組んでいる。次にbipedal 歩行者のイメージがある。
 19KB イメージ
19KB イメージ |
| 79. 名古屋大学 の福田の実験室に生物的促されたロボットシステム (BIRS) と呼ばれるプロジェクトがある。 ロボットに約1.5 のm 高いようで、20 DOF がある。 彼らにそれに取り組んでいる4 人の 教授および約30 人の学生の スタッフがある。
|
80 。斧山 、韓国の 韓国海上大学に方法の下で主要なbipedal 人間の特徴をもつプロジェクトがある。それはTohoku 大学プロジェクトのような日本のプロジェクトのいくつかにかなり類似している見る(#20 を上見なさい) 。 ここにリンクは- 韓国語か 英語 の… ある。

|
| 81. ここに最初のイランのアンドロイドはある。 それはFiratelloid (
最初にイランの理性的な人体ロボット) と呼ばれる。それらはマルチメディアページのある映画を有する。主な開発者はMohamad Shayganfar 及びArak のAzad 大学からの ベンジャーミンFonooni である。 (Arak 、イラン) 。
 Firatelloid 。
Firatelloid 。 |
82. ここにPangbourne の Castrol
のオートバイの会社 、イギリスの"頭のない騎手" はある。 ロボットはNeuhaussen のStahle Gmbh 、ドイツによって実際に造られた。 
このロボットに2 本の腕および2 本の足があり、オートバイに取付けられる。
|
| 83 。Linz の人体ロボットの ロボット工学の実験室、オーストリアはBarbot - 棒でビールを買い、飲む人間の形をしたロボット造った!
これは何でも食べるか、または飲むかどれが私が会った最初の人体ロボットである。
ロボットを動かす力にビールを変えるそれらは方法の提案を取っている。それは高い1.7m 、及び30 キログラム重量を量る。Barbot に7
DOF があり、あなたの党かでき事のために予約することができる。  Barbot - Linz 、オーストリア
Barbot - Linz 、オーストリア
|
84. ミュンヘン ドイツの Amorphic ロボット仕事はSkelli と呼ぶ移動人間の骨組を 造った。
それに正常な大人のサイズ、表面で16 を含んで34 DOF
がある。高度の遠隔測定工学のスーツは関係者が機械挙動を教えることを可能にする。人類、この人体ロボット機械がである恐れ明示する表現のいくつか、怒り、喜び、悲哀、驚きおよび苛立ちの共通性を反映するように設計した。
 Chico MacMurtrie とのSkelli
Chico MacMurtrie とのSkelli
 Skelli の肩の細部。
Skelli の肩の細部。
|
| 85. Waseda 大学人体ロボットのプロジェクトに "Wendy" と呼ばれる別のプロジェクトがある。 "Wendy" はHalady に類似している。 それは52 DOF の合計を有する。 テキストが白にある、従ってカラープリンターで- 少なくとも正しく印刷しないこと用心しなさい。 ここにWendy の映像はある。  イメージは42K である。 イメージは42K である。
|
86 。今Waseda 大学にiSHA と呼ばれる別のプロジェクトが ある。この人体ロボットに電動機によって大抵運転される26 DOF がある。それは2 時間自律的に作動できる。ワウ! 非常に印象的!
 iSHA 。
iSHA 。
|
| 87 。Waseda に(私が最終的に見つけた) 別のプロジェクト呼ばれたRobita が ある。人々との転換を行なうことを設計する。 彼らはYosuke Matsusaka のページの 複数の映画を有する。このプロジェクトはずっと1999 年6 月以来活発である。
 Robita
Robita
|
88 。Waseda 大学にまたWamoeba と呼ばれるプロジェクトが
ある。 Sugano の実験室で造られるその。それは1995 年以来の3 つの版がずっとあることをようである。次の映像は最新- 呼ばれたWamoeba 2Ri である。  Wamoeba - 2Ri
Wamoeba - 2Ri |
| 89. 人体ロボットのロボットシステムはソウル、韓国の科学
そして技術の韓国の
協会の理性的なロボット工学の研究所で開発されている。目的は人間のような自律ロボットを造ることである。 このプロジェクトの名前は-
ギリシャ神話からの半分人間の半分馬の後のケンタウルス- であり、4 本の足を有する。現在のスタッフは14 である。次の映像は人間の上体の部品である。 それらはまた視野の目の調整のプロジェクトをここに 有する。
(* 固定リンク09/11/03 *) 

|
90. 科学 及び技術の韓国の 協会の
Articifial 知性及び媒体の実験室に
developement の下で今2 つのプロジェクトがある。それらは目標の プロジェクトおよびAIMET のプロジェクトを有する。 それらはTaejon のTaejon の キャンパス、韓国で開発されている。 それらに見るべきもあるビデオクリップがある。


( 残ている) 、目標AIMET (中心) 目標
|
| 91. フロリダ の大学に 機械知能の実験室、Gainsville 、フロリダで人体ロボットのプロジェクトがある。 人体ロボットはPneuman と 呼ばれる。含まれている教授は次のとおりである: Antonio の細流、ミハエルNechyba 、エリックSchwartz 。プロジェクト に取り組んでいる多くの学生がまたある。人体ロボットに59 インチ高く、102 ポンドを重量を量り、そして25 DOF がある。ここに私が 見つけたもう一つの 記事はある。
 Pneuman 。
Pneuman 。 |
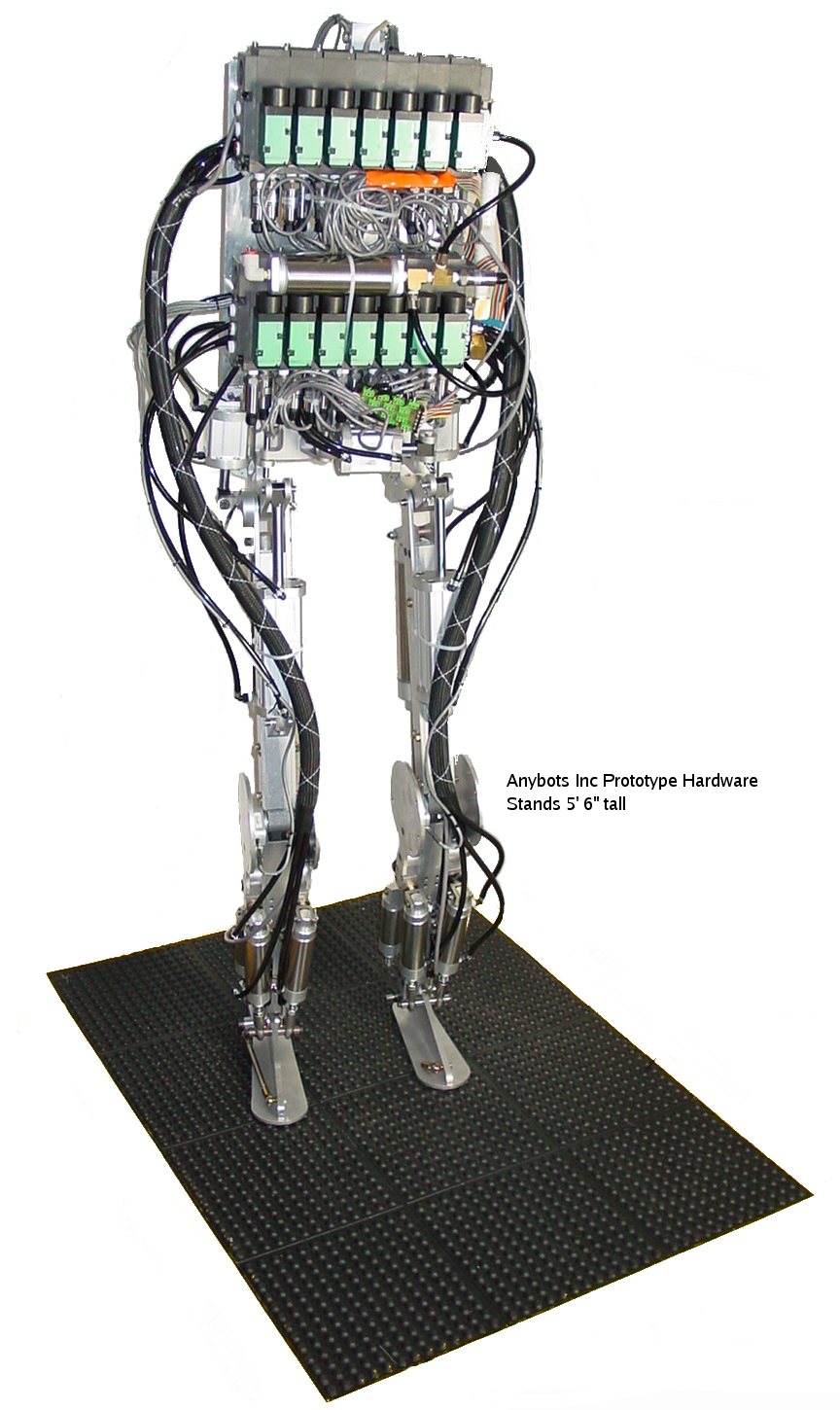
92。 山景色、カリフォルニアのAnybots に方法の下で フル・スケールの人体ロボットのプロジェクトがある。 各足に7 DOF があるようである。 それらは縦にバランスをとる足のビデオを有する。 それらはまた手のプロトタイプを有する。

|
| 93. ドイツのKarlsruhe の大学にSFB 588
の人体ロボットのロボットと呼ばれる大きいプロジェクトがある。 ロボットに足がまだあっていないが、各手のための約15 DOF の非常に可能な手を有するようである。 従って全面的な数は40 及び50 DOF の間にある。 
 素晴らしい手。
素晴らしい手。 |
94. ミュンヘン(ドイツ) のBundeswehr 大学の測定科学の協会にHermes と呼ばれる大きいプロジェクトが ある。それらをずっと昔にリストしない為のそれらへの私のappologies 。このプロジェクトはずっと1996 年以来行っている。主な調査官はRainer Bischoff であり、7 人の他の 職員および
プロジェクトに取り組んだ約35 過去のスタッフおよび学生がある。彼らはよい進歩をした。 
|
| 95. カーネギーMellon 大学(CMU) 及びピッツバーグの大学は全米科学財団からの$1.4 百万 補助金のNursebot と、呼ばれた主要なプロジェクトを始めた。 これはそれらにそれの様々な部分に取り組んでいる 50 人多数がある ので巨大ようである。それらは2 つのプロトタイプを有するようである: 真珠及びフィレンツェ。高いその約4 フィート。  50 のKB
50 のKB
|
96. Tamim Asfour のKarlsruhe (ドイツ) の大学の卒業生学生は、ARMAR と呼ばれる人体ロボットを造っている主要なプロジェクトの部分 である。スタッフの数: 私への未知数。 
ARMAR - 124K
|
| 97. アムハーストのマサチューセッツの大学に知覚のロボット工学のための実験室で 人体ロボットのプロジェクトがある。Roderic Grupen 教授はディレクターである。 彼らに プロジェクトの4 人の教授および約20 人の学生がある。 それらはMIT 及びVanderbilt と同じような人体ロボットのupper-half を- 造った。人体ロボットに2 本の機能腕(それぞれ7 DOF)
および2 つの3 つの指手( それぞれ4 DOF) を含んで約29 DOF が、ある。
 UMass の人体ロボット。 UMass の人体ロボット。
|
98. 工学のVanderbilt 大学学校に開発の下でISAC と呼ばれる 人
体ロボットの ロボットがある。 このプロジェクトに4 人の教授および23 人の学生がある。プロジェクトは約5
years.Their の現在の目的のための彼自身の経験から学び、自然な方法で人々と相互に作用していることをISAC
が可能にすることである進行中でした。最終的に、ISAC は年配のための家の介護者か弱いである。
理性的なシステムのための中心のディレクターは教授であるKawamura 。スタッフはProfs を含んでいる。Peters 、Wilkes
、Biswas 、およびGaines 。
 46KB イメージ
46KB イメージ
|
| 99. ProtoAndroid の プロジェクト (オースティン、テキサス) は創設者および大統領がデイヴィッドSantos であるFaustexSystems Corporation によってこのプロジェクト融資される。このプロジェクトは少なくとも1992 年以来の開発の下にあった。 それは高い 6' 4" 、約300 ポンドを重量を量る。スタッフのサイズは約5 である。それらはまた次に示されている H2 武道の
ロボットを造った。
 116K. 116K. |
100. タイに今最初人間の特徴をもつプロジェクトがある。 Thonburi の技術のMongkut's University 王 アンドロイドを造っているも。 
|
| 101. 1996 年に始められて、 Aandroyds 株式会社は 販売のための2 台、4 台、そして6 台のlegged 機械のラインを提供する。機械は利用できる注文の実験室及びスペースモデルとの家、オフィス、および企業のために、設計されている。Aandroyds.com でそれらを 見つけなさい。 |
102. UCLA のジェニファーBest 先生は新しい人間の特徴をもつ 開発のプロジェクトを導いている 。 主要な網リンクは
サーバーがあるので働かないかもしれない。この1 つを 試みるかもしれない。主要な学校と私達が大きい事を期待できることをことをこのプロジェクトを支持するUCLA を私確かめる好みなさい。 |
| 103. ソウル、韓国の技術 のKumoh の国民大学にミ
ニチュア人体ロボットのロボットを造っているプロジェクトがある。それは機械工学部の部分であるmechatronics
のグループによって造られている。それらは人体ロボットのロボットが階段の上下に歩くことができることを主張する。ワウ!
ここに私が見つけた幾つかのペーパーはある。 [ 1 ] Y. W. Sung 、及びS. のY. Yi 、"階段の上下に" 歩くことができるミニチュア人体ロボットのロボットProc 。Robotics'2001 の国際シンポジウムの、ソウル、韓国2001 年
[ 2 ] Y. W. Sung 、及びS. のY. Yi 、"ミニチュア人体ロボットのロボットシステムの開発" 、Proc
。ロボット工学及びオートメーション2000 年の国際シンポジウムの、Monterrey 、メキシコ、pp.133‾138 2000 年
|
104. 北京、
中国のTsinghua 大学にbipedal 人体ロボットのロボットプロジェクトによって呼ばれるTHBIP-I がある。 このプロジェクトは古い数年である。 ここに1 つの ニュース記事はある。 ここに私が見つけた少数のペーパーはある: [ 1 ] 大学、中国"Biped 人体ロボットのロボットTHBIP-I" 李劉、Jinsong Wang 、ケン陳、Jiandong Zhao およびDongchao Yang (Tsinghua)
[ 2 ] "Anticipant ZMP Tranck" のDongchao Yang 、李劉、Jinsong Wang 、大学、中国ケン陳(Tsinghua) に基づく人体ロボットのロボットの足取り計画
[ 3 ] "Biped 歩くロボット" Kai スー、ケン陳、Jinsong Wang 、李劉、Dongchao Yang 、Jiandong Zhao のための足取りの生成の新しい方法
製造業工学の協会、Tsinghua 大学、中国 |
| 105. 十分に大きさで分類された歩き、話すアンドロイドを造るために理性的な地球、Kirkcaldy に、スコットランドはある、会社新しいプロジェクトを発表した。発表は BBC からのこのニュース記事の端に現われた。
 Doki Doki
|
106. Freiburg の 大学、ドイツは 2004 年の1 月に勉強の人体ロボットのロボットを写し出す始めた。
Nimbro と呼ばれるプロジェクトはSven Behnke によって指示されて、約12 人を含む。 彼らは高い約150 cm
(5 フィート) 、約38 キログラムを重量を量る人体ロボットを造る。 それに22 DOF がある。
それらはRobocup の人体ロボットのサッカーのトーナメントで競うことを望む。
|