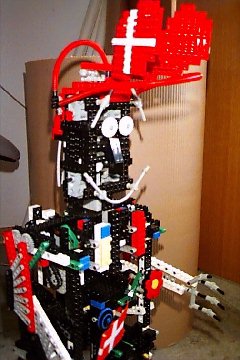
Elektra is a ‘humanoid’ robot approximately 75 cm. tall. She is built out of common Lego pieces and two Lego Mindstorms RCX’es, and the fact that the pieces are in all possible colours helps give the spectator the impression, that he or she might actually build a robot just like Elektra with the pieces that he or she already has at home (Elektra is on the left in the picture). Elektra has many different functionalities. For one she has a face, that can look sad and smile (this self sufficient model is already described in detail in the report "A three-dimensional smiley") due to its movable eyebrows and mouth. On top of the head is built a functioning ‘clapping hat’ well known from international soccer games. The head uses one motor that controls both eyebrows, mouth and hat. Also, the whole head can turn both sides. Another motor (with a touch sensor) controls this motion.
Beneath her feet, Elektra has belts that can move her around. Unfortunately, due to her considerable weight, the belts tend to break quite often, when Elektra explores rough terrain. Two motors control the belts, one each. On each foot she has a bumper on a touch sensor so that when she hits something, she will back up and turn the other way. Of course, Elektra is equipped with arms and hands. The ones she has at the moment are temporary, in the future they will be more complicated. All that the arms do now is swing back and forth like people’s arms do when they are walking. One motor controls this. The hands do not move. In her chest there is a small codereader module. A code is a 4x4 Lego plate with 4 coloured 1x2 pieces on it, the one at the back being black. When you push a button on Elektra’s front, the codereader will expect you to insert a code in the slot. The code will be rolled in and out again, while a Lego flower is rotating to indicate the activity going on in this area. When the code has been read, Elektra will enter one of several different modes (or moods), and her behaviour will change according to the mood. For instance, three yellow pieces in the code might turn her into a smiling and singing robot. These codes control her movement, her facial expression, her head movement and her sound signalling. The code reader uses one motor, one light sensor and one angle sensor. Once started, Elektra can function completely autonomously. The two RCX’es communicate with each other via the infrared link, but there is no communication with the computer. If nobody presses the button and gives her a code, she will move about in her own mysterious ways. Elektra was built for two reasons. One is obvious: she is a magnificent eyecatcher and has already made her TV-debut for CNN International. Children love to play with her and try to make her happy, and the illusion that she is ‘alive’ is more easily adopted by children because of her childlike size and her human features. The second reason is that she is a nice robot to use for initial research in the field of expressing robotic ‘feelings’. She has a varied body language besides her expressive face, and she also makes sounds. To my knowledge, this way of constructing a changeable face (using bendable air hoses as described in the aforementioned report) is new. Elektra has already gloriously starred in such renowned events as Global Tendency Machine (part of Stockholm Cultural Capital ’98), the press conference following the opening of the Intermedia initiative, the Ĺrhus University Open Day ’98, the Danish Natural Sciences Festival ‘98 and last but not least the Robot Soccer World Championship in Paris ’98. Jakob Fredslund chili@daimi.au.dk |
|